四足机器人由于其运动稳定性在人们日常生活中的应用越来越广泛,但是由于相关硬件和软件的制约,现有的机器人只能被束缚在一个固定的形态下工作,这种固定的形态使现有机器人不利于在复杂的环境中使用。
形态自适应机器人是一项很有前途的技术,它可以在工作状态下适应大量不可预测的环境和任务,而不需要在机器人每次遇到意外情况时再重新设计。近日,来自奥斯陆大学(University of Oslo)信息学院的研究团队成功研制出了一种新型四足机器人,它不仅能够感知地形变换,同时还能根据地形变换自动改变形态。这也是人类历史上第一个功能齐全的形态自适应机器人。相关论文以 “Real-world embodied AI through a morphologically adaptive quadruped robot” 为题,于 3 月 16 日发表在科学期刊 Nature 子刊《自然-机器智能》(Nature Machine Intelligence)上。

新型四足机器人基于一种嵌入式的人工智能,由一个允许可以变换形态的四足机器人和一个适应算法组成。其中基于人工智能的适应算法,可以在当前感知地形的基础上,使机器人在最节能的形态中不断变化。利用这种基于人工智能算法的四足机器人,训练它在不同形态配置之间的有效过渡,结果表现出了大幅度的性能提升。这种人工智能与机器人结合的方式,展现了一种将形态学适应性融入未来机器人设计的潜力。
机器人固定结构的束缚
10 年前,日本发生 9 级地震引发海啸,福岛核电站受到影响发生爆炸。直到现在,核电站爆炸波及的地区,依然受到核辐射的影响,危害环境和人类健康。如何检测核反应堆现在的情况,技术上的限制意味着最终的解决方案需要大量高度专业化的传统机器人,相应地需要大量的部署和延长任务时间。但是检测核反应堆区域的机器人,面临着许多艰难的挑战:通过一条狭窄的管道进入该区域,穿过平台之间的缝隙,穿过各种类型的碎片,甚至在浑浊的水中游泳。
设计一个机器人在如此多样和非结构化的环境中工作是一项具有挑战性的任务,因为在工作过程中,环境条件可能会发生变化,有时甚至是剧烈的变化。使机器人变形从而适应周围环境是一个十分有吸引力的解决方案。尽管这种解决方案极具挑战性,但是却能够实现机器人处理更复杂的任务。在现实世界中直接优化或改变机器人形态的例子比较少,现有改变形态的方法主要是利用手动装配或重新配置的外部机构。这种方法需要大量的时间、外部设备或人工干预,并且不适合在独立操作期间进行连续调整。
基于 AI 的四足机器人
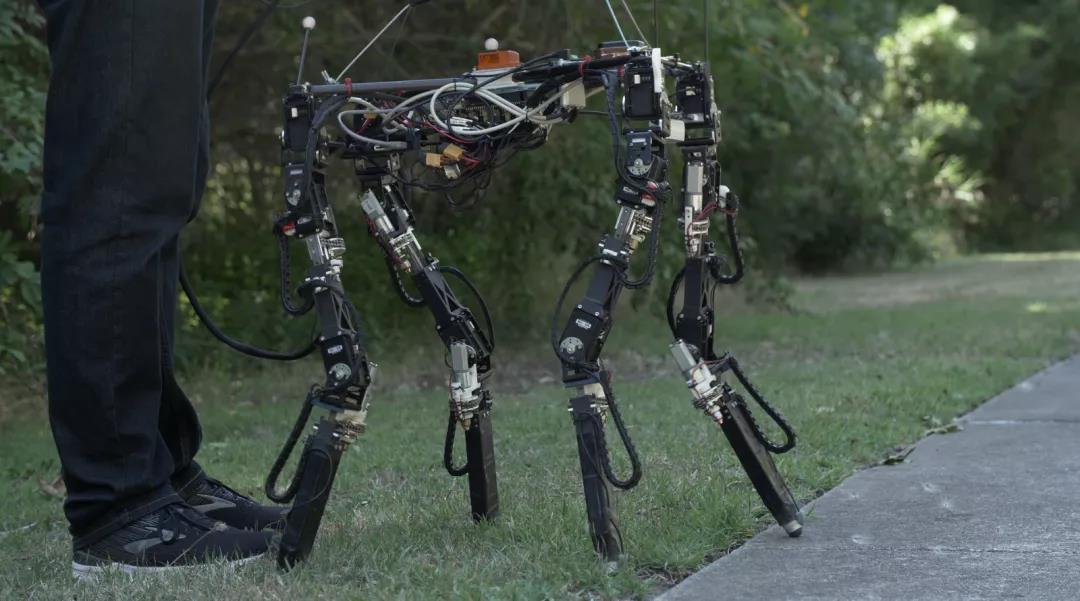
正是因为设计、建造和维护具有复杂动态形态机器人所面临的挑战,所以几乎没有内置形态适应能力的机器人。近日,来自奥斯陆大学的研究团队成功开发了一种基于人工智能的形态学自适应四足机器人,它可以利用可变的形态来适应不断变换的室内或室外环境。
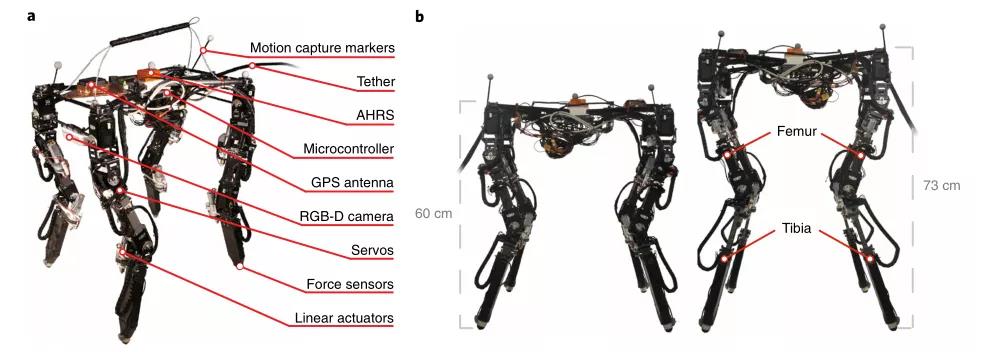
四足机器人形态适应功能是通过可变长度的腿提供的,它股骨和胫骨的长度可以在工作中得到调节,从而实现不同的行走方式。同时,形态自适应机器人通过一种新的地形适应算法,使机器人的形态适应当前地形。这种算法通过知识引导,在线改变机器人的形态配置,以便在感知的地形特征时,通过变换形态从而优化能效。该器人具有保持合理有效载荷的能力,并且在真实世界可以执行户外各种任务。同时,它还具有传感和驱动功能,可以在具有挑战性的现实环境中关闭体现大脑 - 身体 - 环境回路。此外,该研究有助于为灵活的硬件平台作铺垫,这些平台能够在室外等非结构化的地形中执行各种有用的任务。
不同环境不同形态
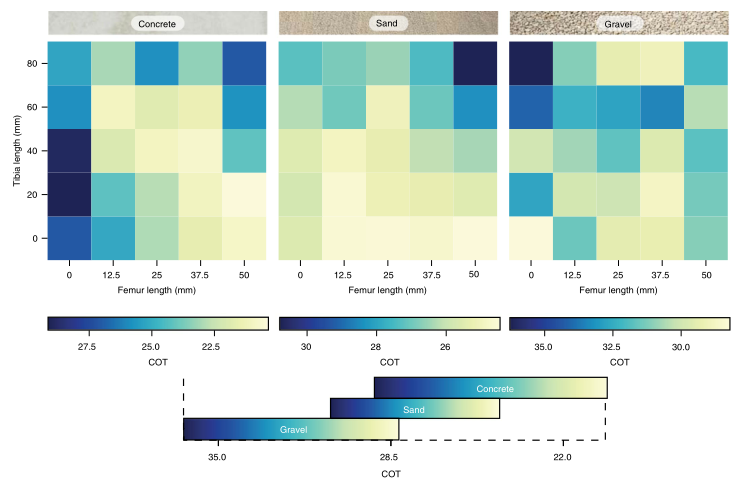
为了探究形态学自适应机器人的性能,研究团队分别在不同的室内环境和真实的室外环境中对机器人进行了一系列的测试。在观察到对机器人行为的显著影响之前,需要测量腿长的最小变化。每个腿段限五个均匀采样的离散长度,总共给出 25 种不同的形态组合。
当在混凝土上行走时,机器人以长股骨和短胫骨以及中等股骨和中等胫骨实现最佳能耗。在沙地上,机器人使用短至中等长度的胫骨有很高的效率,而股骨长度对能耗的影响较小。砾石的稠度要小得多,但是使用最短的腿可以实现最低的能耗。
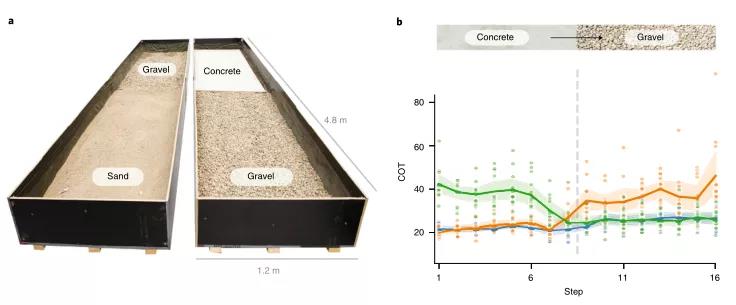
在室内的测试中,研究人员分别测试了沙子 - 砾石和砾石 - 混凝土组合下机器人的适应能力。这些盒子被放置在一个运动捕捉设备中,以实现高精度的室内定位。能耗数据显示,在一个地形上特化的形态不能很好地转移到另一个地形上,没有一种形态在两个地形上都是表现最好的。混凝土专用形态(橙色)的平均能耗为 23,过渡后上升至 37,导致能耗降低约 60%。砾石专用形态(绿色)从平均能耗为 36 开始,但在砾石上达到 26,显示在踏上形态的最佳地形后提高了约 70%。自适应形态学(蓝色)在这些已知的地形上表现一致,并且变化检测算法在适当的时间触发形态学的切换。
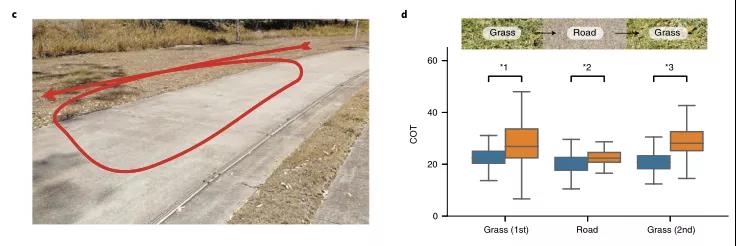
户外测试的路线从一片草地开始,然后机器人踏上混凝土道路,最后它回到草地上。再次回到同一个表面,可以测试算法能够在何种程度上基于先前在草地上行走的经验来调整它的模型。能源效率数据显示,每个阶段的效率都降低了 10% 以上,这种适应性在所有三个地形部分都优于全方位的最佳形态。同时,研究人员还对自适应算法进行了分析,自适应算法允许机器人在自然、非结构化的地形上进行现场室外实验时,使用以前学习的模型作为参考点,根据以前看不到的环境不断改变其形态。在重新回到已有环境时,自适应算法成功地将新地形的经验与基线数据集相结合,以快速生成低误差预测。
4
朝着更加完美的方向迈进
改变形态来适应现实世界环境,是征服非结构化地形的一种强大而有前途的技术,与当前机器人普遍存在的静态形态相比,具有相当大的优势。一系列室内和室外的测试显示,该机器人系统可以快速的在草地上学习到高性能的形态,尽管它以前只经历过沙子、砾石和混凝土。研究团队的一系列试验也已经证实了这种方式的有效性,并且与最好的单一静态形态相比,嵌入的人工智能提供了显著改善的性能。这种动态变形策略在测试过程中比任何单一静态形态都具有更好的能耗,并且自适应形态是机器人在非结构化地形中工作的一个有利特征。但是,现有的形态自适应机器人研究也存在一定的不足。研究所使用控制器到形态学的一对一映射,而不是明确搜索有效的身体 - 大脑组合。相比较来讲后者是一种拥有更快适应速度的方式。在高度动态的环境中,更快的适应将是有利的,但是现有的变换速率较慢。在这种环境中,机器人必须不断地在其瞬时形态配置和模型预测的最佳配置之间追赶。同时,未来也可以考虑更高级的形态适应机制。
(来源:Freepik)这些结果的影响可能是深远的。研究人员希望能够启发类似机制的设计和采用,例如在商业平台上,以进一步扩大它们的使用范围。同时,这项研究工作是朝着形态自适应机器人方向迈出的重要一步,也标志着机器人在非结构化环境中操作的总体目标得以实现。
参考资料:
https://www.nature.com/articles/s42256-021-00320-3
