
机器人技术与系统国家重点实验室刘英想教授团队在Wiley旗下智能系统领域旗舰期刊(Advanced Intelligent Systems)发表了题为《受节肢动物分节现象启发的微小型谐振式六足压电机器人》(Arthropod-metamerism-inspired resonant piezoelectric millirobot)的学术论文,该研究受节肢动物分节现象启发,提出了一种微小型谐振式六足压电机器人,其兼顾了快速运动、高分辨力和运动灵活性强等优异特性,在核辐射、电磁干扰等极端环境的精密检测和运输等领域有着潜在的应用前景。哈尔滨工业大学刘英想教授、博士生李京和博士后邓杰为论文共同第一作者,刘英想教授为论文通讯作者,该项研究工作得到了国家自然科学基金项目(项目编号:U1913215和51622502)的资助。
▍研究背景
微小型移动机器人由于其体积小,重量轻和运动灵活等特点而具有许多优势,近年来成为机器人技术研究发展的热门方向之一。它们不仅可以在大型机器人或人无法到达的狭窄空间中移动和操作,而且可以在无法承受重载的环境中进行部署和应用。
这些特性使它们有潜力应用于生物工程、军事侦察、能源探测、显微操作等诸多领域。
传统的微型机器人大多采用电磁驱动方法,但是它们的结构相对复杂;通常使用传动系统来实现速度转换,限制了微小型化设计。

(由电磁场远程控制的微型机器人示意图,可在人体内运动,进行给药或者手术)
随着新型智能材料的迅速发展,包括压电陶瓷、形状记忆合金、介电弹性体等新型智能材料逐渐应用到微小型多足机器人的研制中来。
其中,基于介电弹性体驱动的微小型移动机器人通常需要高电压来实现驱动,且高应变驱动下可靠性和耐用性较差。
(介电弹性体驱动的微型机器人)
形状记忆合金机器人通常需要较长时间才能冷却,带宽受限,负载能力和响应速度相对较差。磁致伸缩机器人需要庞大的设备才能产生外部磁场源,并且容易受到电磁干扰。
(由磁场和光驱动的微型机器人)
此外,已经开发了由光和热驱动的微小型移动机器人,但响应较慢,输出速度有限。压电材料具有响应速度快,分辨率高,功率密度高,无电磁干扰等诸多优点,有利于实现移动机器人的小型化设计和提高其输出特性。
目前,已经成功开发了许多基于压电陶瓷驱动的微小型移动机器人,但是它们仅选择性地展现了小型化,快速运动,高分辨力,良好的鲁棒性和高敏捷性等性能中的两种或三种特性。小型化、快速运动、高分辨力、高灵敏性和良好的适应性是移动机器人设计中相对矛盾的特性,兼顾这些性能是一项极具挑战性的研究工作,有利于拓宽微小型移动机器人的应用范围。
▍创新研究
受自然界中节肢动物分节现象的启发,研究人员提出了一种类似节肢动物单个体节的压电腿基本构型;采用了足腿一体化设计的方案并详细分析了压电腿的驱动原理;针对驱动原理需求,确定了压电陶瓷片的极化方向、布置方式以及所需激励方案。
将单个压电腿构型作为基础单元,规划了一种由三个相同的压电腿结构组成的微小型谐振式六足压电机器人。分析并确定了压电腿二阶弯振频率达到20kHz以上(超声模式)以及驱动足端位移在低电压(10Vp-p)激励下达到微米级的设计目标,利用有限元仿真分析了六足压电机器人的动力学输出特性并确定了结构参数。
完成了压电腿和六足压电机器人样机的加工和装配,机器人体长为58 mm,重量为42.55 g。对压电腿的振型特性和足端位移特性进行了测试,测得压电腿的二阶弯振固有频率和驱动足端位移均很好地符合了设计目标。
搭建了两种实验测试系统,并针对六足压电机器人的直线、转向和旋转运动开展了一系列运动特性测试。测试结果表明六足压电机器人可以同时实现结构紧凑,运动速度快,分辨率高,运动灵活和速度范围广的特点,还具较强的适应性,并且可以承载载荷,爬坡和穿越障碍物。
具体来说,提出的微小型谐振式六足压电机器人取得了以下几个关键进展:
(i)通过使用连续和脉冲正弦激励方案,机器人实现了516mm/s(约9BL/s)的高速运动和0.44μm(约8e-6BL)的高分辨力,实现了快速运动和高分辨力的兼顾;
(ii)机器人的速度可以在0.26mm/s到516.3mm/s的超宽范围内平滑调整(跨度为3个数量级),这是已知发表研究成果中微小型移动机器人实现的最宽速度范围;
(iii)在200g负载(自重的4.7倍)下,速度仍保持初始速度的60%(无负载);
(iv)该机器人可以运行在具有不同粗糙度的多种材料上,成功在具有不同坡度的透明管道中穿梭,并顺利地越过各种障碍物,显示出其出色的适应性;
(v)机器人不仅可以实现双向线性运动,而且可以灵活地执行转向和旋转运动,展现出较好的敏捷性;
(vi)机器人以超声频率谐振模式工作,避免了噪声,有利于人机友好合作。综上可见,该微小型谐振式多足压电机器人具有运动速度范围广、分辨力高、负载能力强和越障能力强等显著优势,在核辐射、电磁干扰等极端环境的精密检测和运输等领域有着潜在的应用前景。
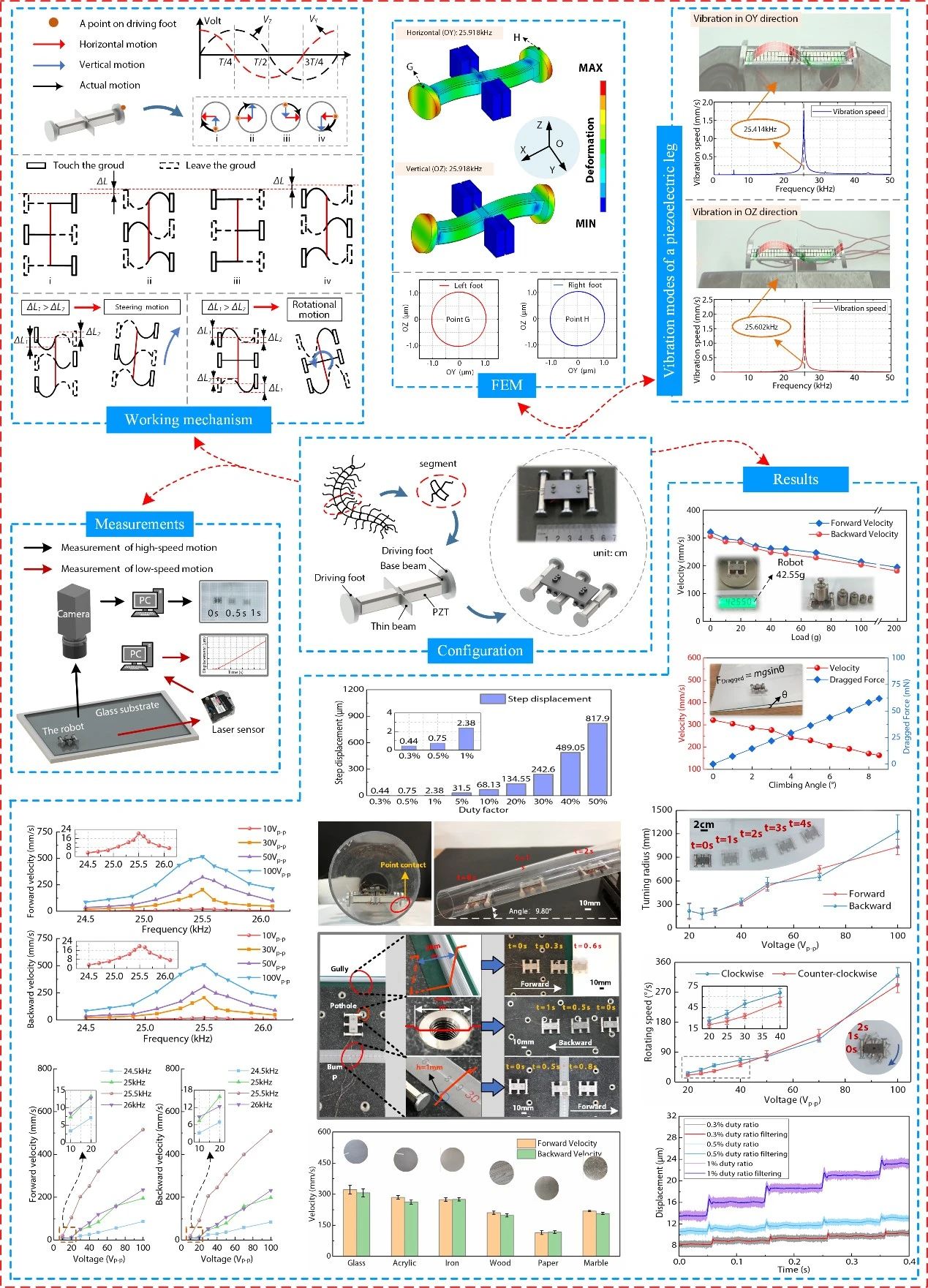
六足压电机器人的结构示意图、工作原理、仿真分析、测试方法及其实验测试结果
文章信息:Yingxiang Liu*#, Jing Li#, Jie Deng#,,Shijing Zhang, Weishan Chen, Hui Xie, Jie Zhao. Arthropod-metamerism-inspiredresonant piezoelectric millirobot, Advanced Intelligent Systems, 2021, DOI:10.1002/aisy.202100015
参考链接:受节肢动物分节现象启发,哈工大团队研发微小型谐振式六足压电机器人-机器人大讲堂
