还记得那个和漫威角色同名的“毒液”材料吗?

当时,南京航空航天大学的研究人员受壁虎启发,用“毒液”充当机器人的“壁虎的脚”,来粘附和适应各种表面,以实现高效运动。

显然,研究到这里还没结束。这次,他们开始研究起了壁虎的脊柱,还开发了一款能像壁虎一样稳定爬坡的机器人—— Slalom !
机器人“Slalom”可以在倾斜和柔软的表面快速爬行,其重量仅为2.45公斤,看起来和壁虎还真挺像!爬坡时扭来扭去的样子憨憨的还有点可爱,就是少了一条像壁虎一样灵活的小尾巴~
模仿壁虎脊柱:从记录真实壁虎运动数据开始
机器人的名字“Slalom”起得很有趣,中文译名是“回转弯”,与壁虎的弯曲脊柱对应。
壁虎的脊柱有什么特别呢?

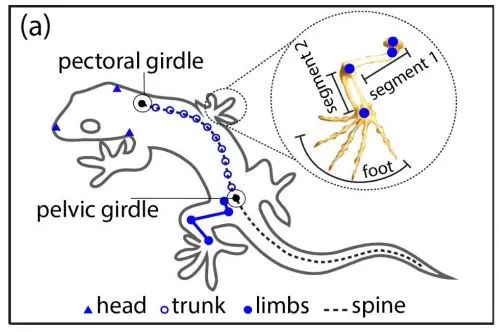
壁虎在任何方向都能灵活稳定地移动,这不仅仅取决于它的尾巴和粘性十足的脚,脊柱也起了关键性的作用:壁虎具有8-11 个活动关节的分段脊柱,可以灵活弯曲,在爬行、转弯、跳跃、保持身体稳定性等运动过程中可以与四肢运动相协调。
同时,壁虎在跑起来的时候,脊柱会呈现出横向起伏模式的驻波和行波,这也增强了运动稳定性。
为了更准确的研究这种运动,南京航空航天大学的研究人员使用高速相机记录了真实壁虎的运动,将壁虎身体表示为笛卡尔坐标中的十个标记点,这些点被转换为连续曲线作为身体的假设中线(身体插值),然后使用MATLAB中的多项式曲线拟合函数(polyfit)进行转换。
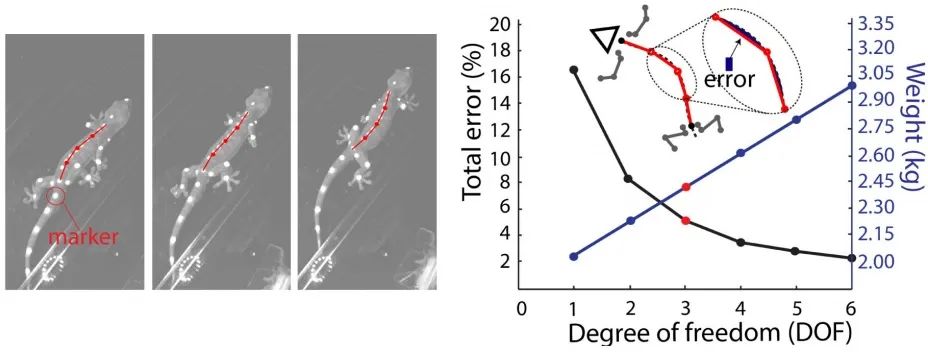
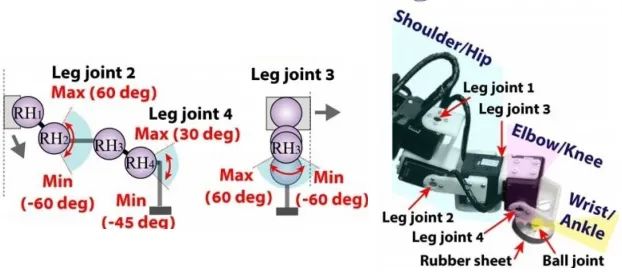
经过多个关节设计的迭代评估,并协调了误差与复杂性,研究人员最终选择将机器人“Slalom”的脊柱设计为3个关节,这些关节可以在运动中围绕垂直轴旋转± 60度,弯曲体运动时,机器人可以周期性的旋转,这能够再现壁虎的脊柱运动。
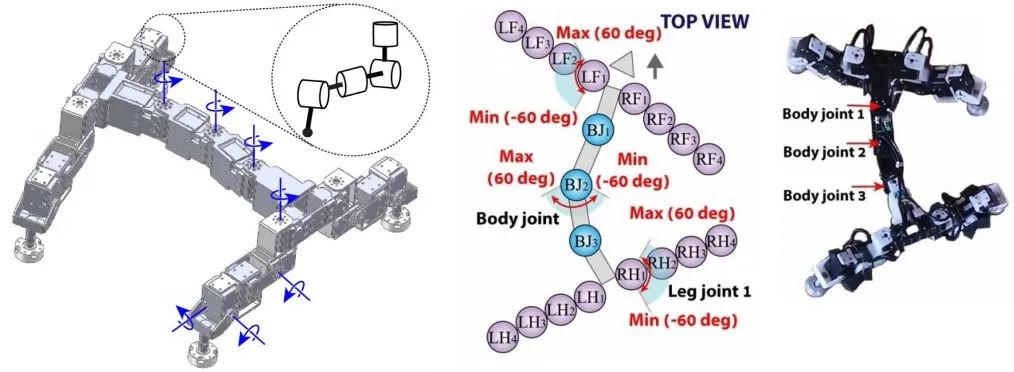
同时,壁虎机器人的四肢设计也很重要,机器人“Slalom”的每个四肢都具有4个自由度,包括肢体与肩部/髋关节连接处的两个、肘部/膝盖,以及手腕/脚踝。壁虎柔顺的脚趾在机器人中被简化为由两层组成的简单结构,顶部由铝制成,连接一个球关节,可为脚提供三个被动自由度,让脚在接触平面时可以被动的自我调整。
基于CPG的神经控制
机器人“Slalom”使用了一种基于 CPG模型的神经控制。
我们先来说说CPG是什么,全称为Central pattern generators,中枢模式发生器,这是一种在无脊椎动物和脊椎动物中都存在的神经回路,它可以在不接收节律输入的情况下产生神经活动的节律模式,“中枢(cenntral)”一词表明产生节律不需要感觉反馈。
CPG模型具有分布式控制、处理冗余的能力、快速控制循环以及允许通过简单的控制信号来调节运动,当这些性质转化为到数学模型时,CPG就可以很好的运用于机器人的运动控制。
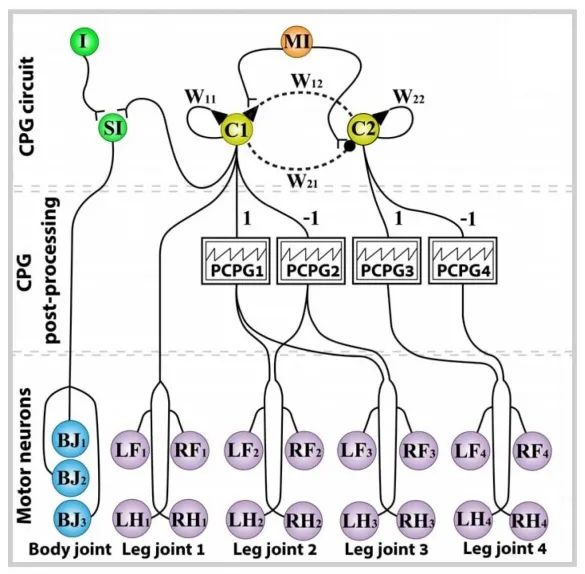
在机器人“Slalom”的CPG应用中,整个神经控制系统具有三个组成部分:
1.神经调节功能的 CPG 机制,用于产生不同的周期信号和分流抑制,用于改变身体关节运动;
2. CPG 后处理,用于塑造 CPG 信号以获得平滑的关节运动;
3. 运动神经元,用于向回转的所有关节发送最终的运动位置命令。
机器人攀爬实验
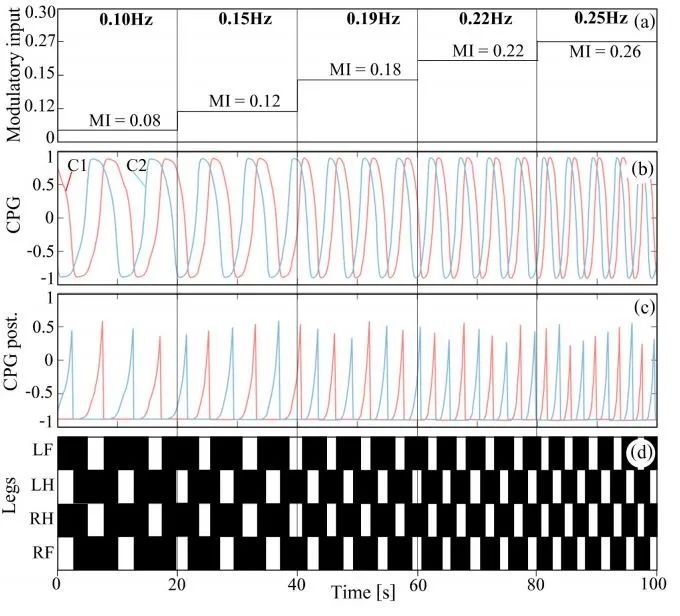
研究人员进行了机器人“Slalom”的攀爬实验,测试它在不同的固体和软倾斜表面上爬行的能量效率。在运动过程中,基于 CPG 的控制,机器人可以产生小跑步态,身体摆动具有与四肢很好协调的C形驻波。
为了显示 “壁虎脊柱”形态的有效性,研究人员还对比了脊柱可弯曲、和脊柱不可弯曲的机器人的爬坡能力。
(脊柱可弯曲机器人顺利爬上25度斜坡)
(脊柱不可弯曲机器人明显爬不动了)
“脊柱可弯曲”机器人分别攀爬倾斜达 30 度的硬表面和 25 度的柔软表面,而在相同的倾斜表面上,“脊柱不可弯曲”机器人开始在实心坡上滑动并卡在软坡上。
这篇文章发表在IEEE Xplore上,论文标题为:Lateral Undulation of the Bendable Body of a Gecko-Inspired Robot for Energy-Efficient InclinedSurface Climbing
从“毒液”到“壁虎脊柱”,未来,研究人员将继续对壁虎这个可爱的小动物进行研究,同时,也会在控制系统上下功夫。
在论文的结尾,研究人员表示他们将使用具有快速学习机制的延迟线和运动前神经网络扩展基于 CPG 的单个控制,以自动获取多种步态和各种身体模式,这种扩展将使机器人有效地实现不同的运动模式,例如步行、游泳和攀爬;也会尝试自适应肌肉模型来设计类似于真正的壁虎般灵活的身体的弹性特性。

论文链接:10.1109/LRA.2021.3101519
来源:南航壁虎爬坡式机器人,脊柱可灵活弯曲,可在坚硬和软斜坡上快速爬行-机器人大讲堂
