2018年12月20日,国际著名学术期刊《科学•机器人学》(Science Robotics)在线发表了“软体爬壁机器人”(Soft wall-climbing robots)研究论文。这篇论文,上海交通大学为第一单位,并由上海交通大学机械与动力工程学院机器人研究所与麻省理工学院软体主动材料实验室合作完成。
当时,上海交大的官网里并没有介绍这款机器人是有仿照自然界中的哪种生物,小编私下里觉得,它的运动模式像极了一种叫尺蠖(chǐ huò)的小虫子,爬行起来既搞笑又可爱。
根据上海交大的实验结果显示,这款软体机器人具有与生物体类似的垂直爬壁、水平爬行、原地转弯能力和敏捷的环境适应运动能力。
这篇顶级期刊文章由当时的上海交通大学机械与动力工程学院机器人研究所的谷国迎教授和博士研究生邹江为共同第一作者。最近,该研究团队在IEEE Xplore上发表了一篇论文,介绍了下面这条受尺蠖启发的“进化”了的软体机器人。
从外形来看,长得更像一条自然界里的虫子了~
论文地址:https://ieeexplore.ieee.org/document/9585535/media#media
尺蠖作为一种幼虫,每一个前进步伐都很小,但它们能够爬过的地形和方向是非常多样的。例如尺蠖能够在水平和垂直表面上缓慢前行,并利用其出色的灵巧性在不平坦的地形上前进。因此,许多研究人员都试图模仿尺蠖构建行动灵活的软体机器人。

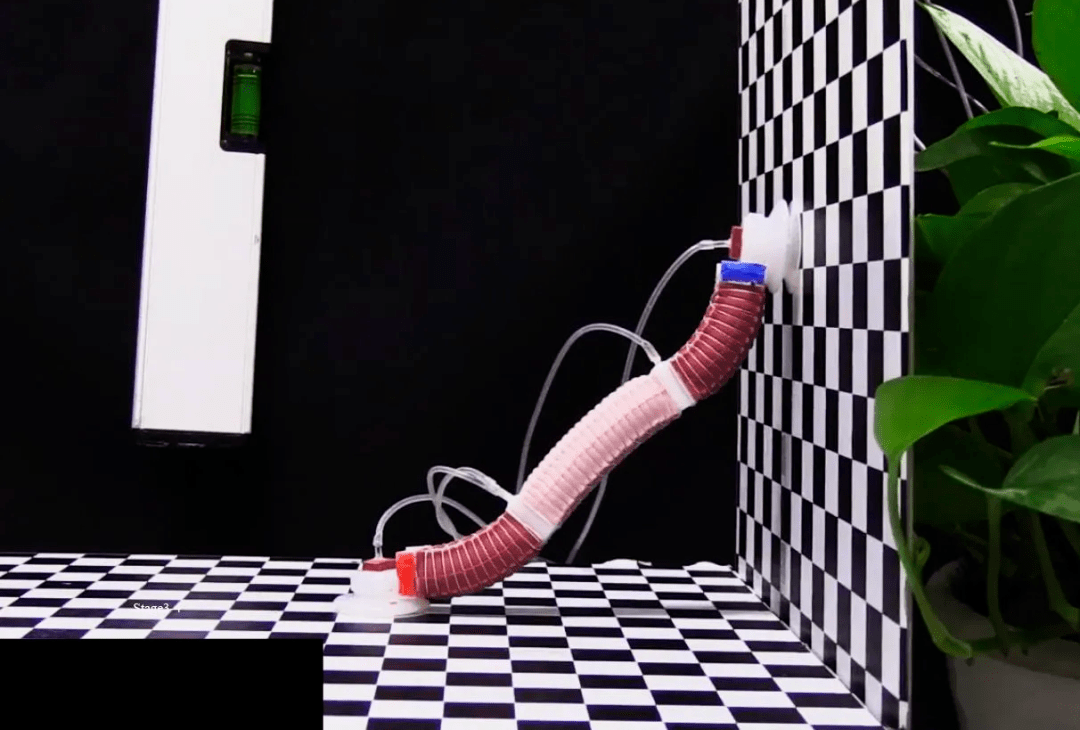
对于软体机器人来说,在水平面和垂直面之间的过渡是非常困难的,因为它们必须既坚固又灵活——足以将一只脚从地面抬起并在垂直的墙壁或表面上立足。
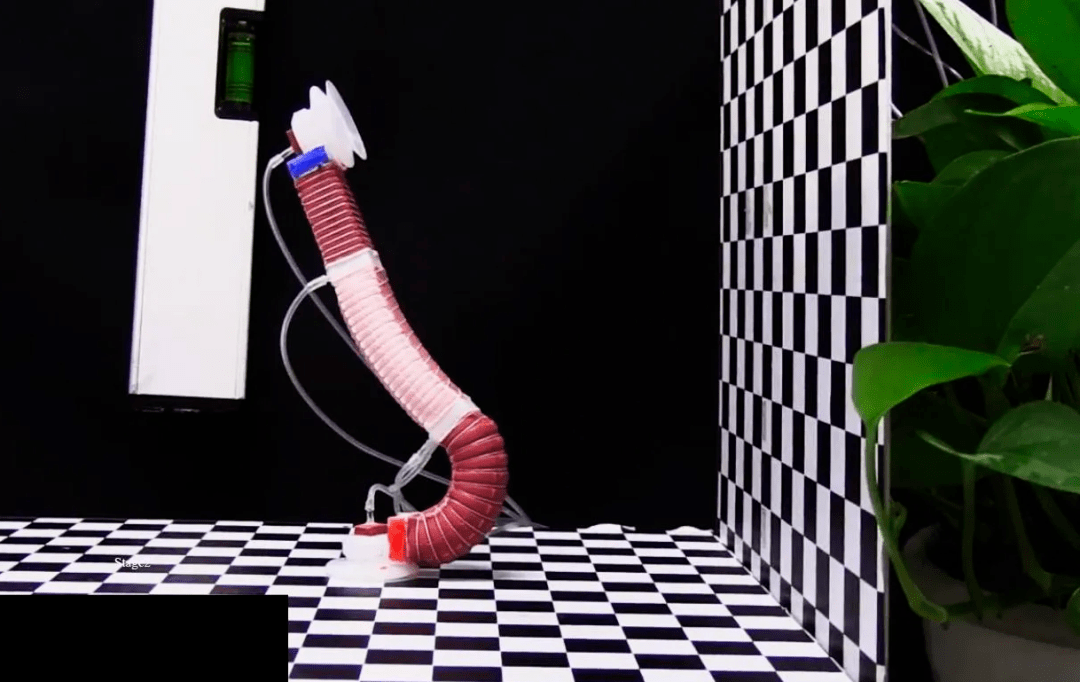
为了实现如尺蠖般的灵活性,上海交大的研究团队用 3 个纤维增强的气动执行器模拟尺蠖的身体部分,作为气动人工肌肉。这种气动机制有助于精确控制机器人的「尾巴」、「头部」和「身体」。同时控制系统负责监控执行器的位置,协调机器人的整体运动,使其在爬行时实现尺蠖蠕动一般的「Ω」形状。
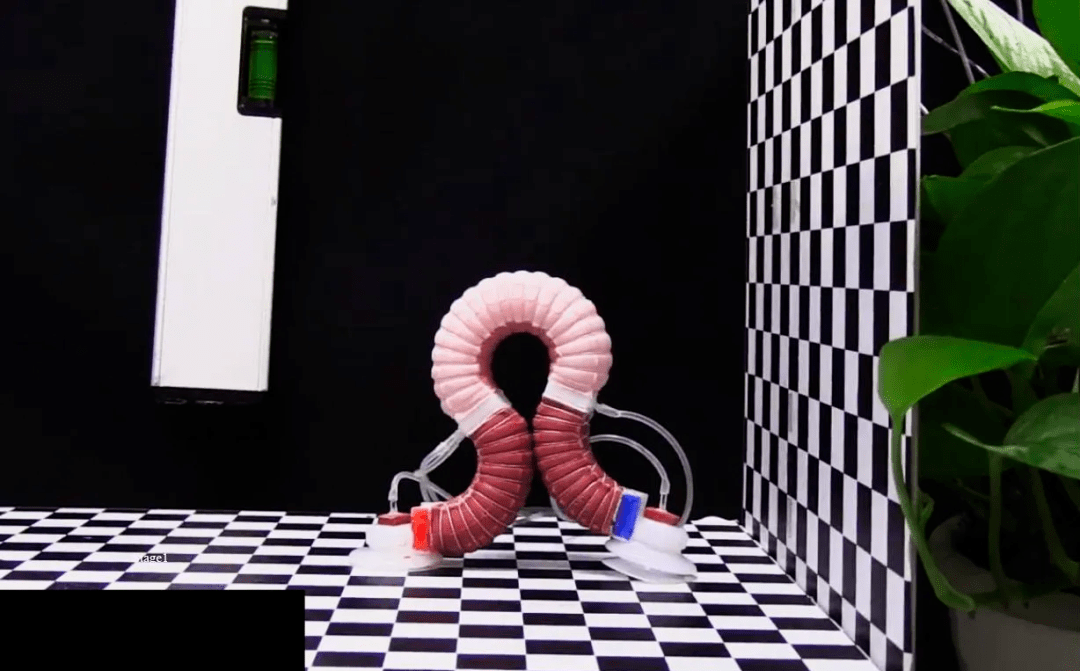
该尺蠖机器人的足部采用两个负压吸盘来产生可控摩擦力。在气动执行器和吸盘的同步推动下,该机器人和真正的尺蠖一样,通过伸展身体并控制足部的压力吸盘「迈步前进」。它在水平面上可以达到 21 mm/s 的最高移动速度,在垂直墙壁上达到 15 mm/s 的最高速度。在负载方面,它能够在水平面上承载 500 克(约自身重量的 15 倍)的重量,在垂直墙壁上可以承载 20 克的重量。
此外,该研究还开发了一个简化的运动学模型来表征该机器人的运动学特征,并提出了一种控制策略来同步控制其多模态运动变形和吸盘摩擦力。
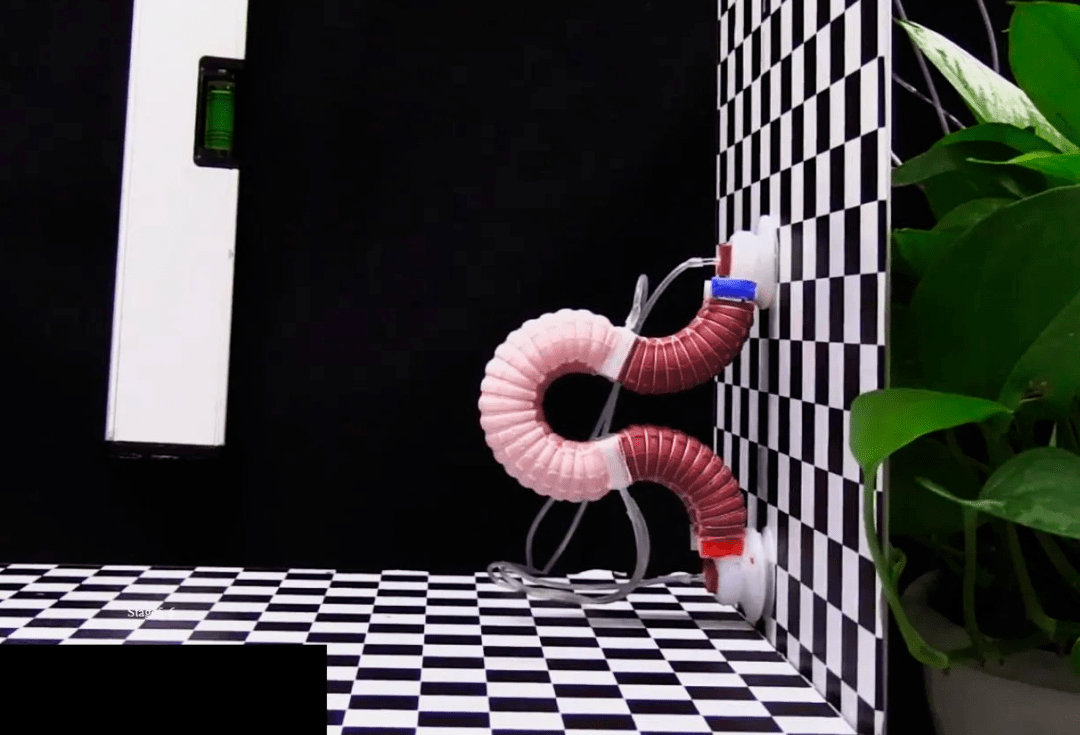
该尺蠖机器人在垂直表面上呈「Ω」状爬行
这是软体移动机器人首次在水平和垂直平面之间实现过渡运动,将有助于扩大软体机器人的工作空间,可用于检查、清洁、维护等方向,并具有在液体中应用的潜力。
未来研究团队将在该软体机器人上添加更多传感器来进一步实现控制自动化,减小驱动系统的尺寸以减小机器人的束缚,并探索该机器人在更复杂环境中移动的可能性,例如天花板、非结构化区域等。
来源:上海交大受“尺蠖”启发软机器人再“进化”!首次在水平和垂直平面之间过渡运动-中国机器人网
