现如今,拥有灵巧手指尖的机器人似乎并不少见,但通常情况下,它们都会被设计成刚性的,并在刚性结构基础上配备各种传感器以提供触觉感知。
然而,这种指尖方案使得灵巧手对于微小物体的抓取变得困难,这是由于刚性的指尖通常与物体的接触面积很小。
近日,清华大学计算机科学与技术系的方斌联合中国地质大学(北京)杨义勇教授课题组和南丹麦大学方承教授,提出了一种新颖的指尖设计,它结合了柔软的磁触觉皮肤和颗粒阻塞结构,保障了指尖结构的柔性、安全性的同时,赋予了指尖感知能力及操作能力。
这项研究以论文 "Soft Magnetic Fingertip With Particle Jamming Structure for Tactile Perception and Grasping"为题发表在IEEE Transactions on Industrial Electronics(Q1, IF8.162)上。

论文下载地址:https://ieeexplore.ieee.org/document/9870656
指尖“舞动”的灵感来源
近几年来,软体机器人领域蓬勃发展。科学家们从广袤的大自然和成熟的硬体机器人中寻找灵感,已经开发了多种具有独特功能的软体机器人,其在人机交互方面的较高的安全性和较好的适应性,引发了广泛的关注。
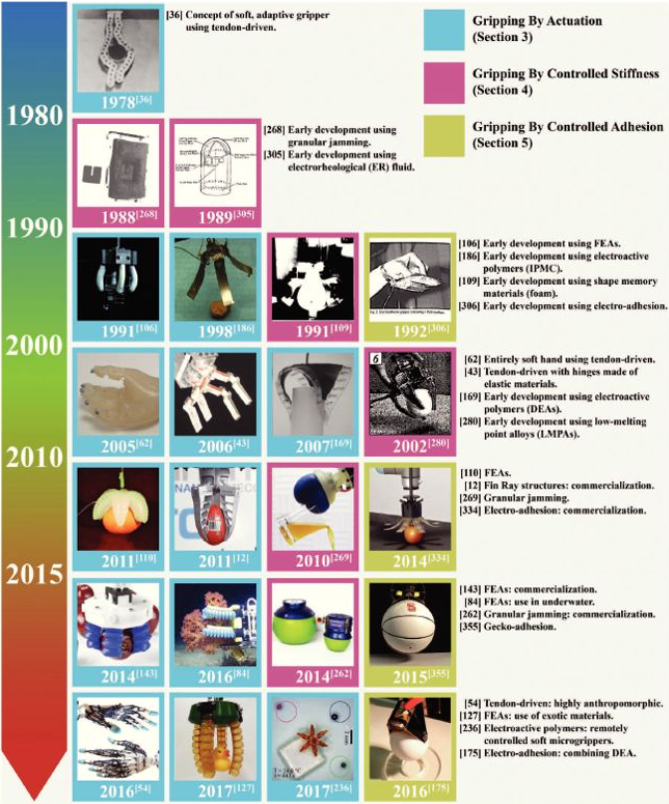
其中,基于颗粒阻塞原理的通用机器人夹持器,作为软体机器人的一个重要分支,也已经被研究了10多年。
图源: Soft Robotic Grippers
在此之前,已经报道了许多结合颗粒阻塞原理的机器人夹持器。在与人或非结构化环境的交互过程中,与纯刚性机械手相比,柔性夹持器与刚性机器人的组合具有更好的安全性、顺应性和可变刚度等优势。
但是柔性结构虽然提高了系统的整体的安全性,同时也带来了感知困难等问题。在某些情景下(如缺少视觉信息的黑暗环境下),软体夹持器仍需要触觉感知,以进一步提高操作的安全性和稳定性。因此,设计一款集成感知和抓取能力相结合的软机器人手指是有一定挑战意义的。
然而,想要简单粗暴地完全复制人类的触觉系统并不可行,因此,研发团队提出了一种新的颗粒阻塞机器人指尖,结合了磁触觉感知机制。颗粒阻塞结构使指尖具有多功能性,指尖可以像Universal Gripper(通用夹持器)一样抓取微小物体。
触觉感知则可以为抓手提供触觉反馈,以调整选择的抓取位置,进一步提高抓取成功率和指尖结构的安全性。当然,这款指尖还可以安装在各类机械夹爪或机械手上,以增加抓取和感知能力。
“手指”是如何被设计出来的?
如此集各种优点于一身的“手指”是如何被设计出来的?这个指尖结构由三个主要组件构成,它们分别是填充干扰颗粒材料的硅胶腔、基座和印刷电路板(PCB)。
那么问题来了,如何实现一系列反应呢?
团队将与永磁颗粒混合的硅胶表面用作柔性皮肤。被磁化后,硅胶表面将产生磁场信号,磁信号可以传输到固定在 PCB 上的 3D 霍尔效应传感器。
当与物体接触时,硅胶表面的变形引起磁场强度的变化,通过霍尔传感器采集的数据处理可以得到接触位置、接触力等信息。
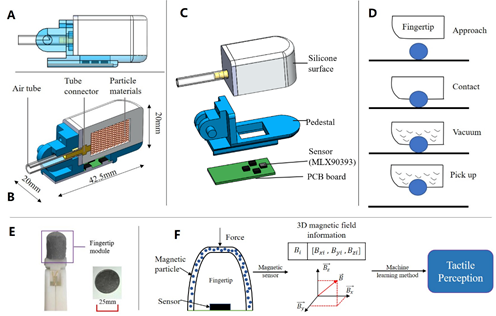
图片所提出的指尖结构设计方案及感知原理
不断实验,获取最优解
搞定了结构设计方案和感知原理,接下来就到了实验步骤。
研发团队首先搭建了实验平台,用于测试变形指尖的弹性性能,该平台包括两个Z轴移动滑台、一个拉压力传感器、一组可更换的测量头和一个固定夹具。
在实验中,研究人员们发现,加载和卸载实验表明力和位移之间存在一定的非线性和滞后性。
在后续的标定过程中,团队采用了深度学习的方法来解决这个问题。此外,多次加载试验结果表明,指尖回弹力好,重复性较好。
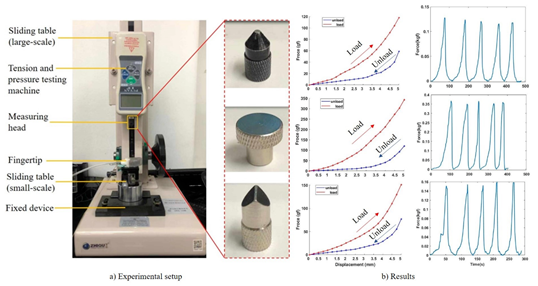
实验平台设置和指尖力-位移性能测试的结果
现在,这款指尖的弹性已经足够OK,那么它的感知和抓取能力呢?
要知道,力和磁场之间的关系是复杂的,表面的力和变形之间的响应是滞后和非线性的。
为了验证这个问题,团队使用了双层LSTM模型来预估所提出的指尖接触力。触觉识别中,LSTM神经网络的应用通常能取得良好的效果,对具有滞后压力响应的传感器的非线性特性进行建模也不在话下。
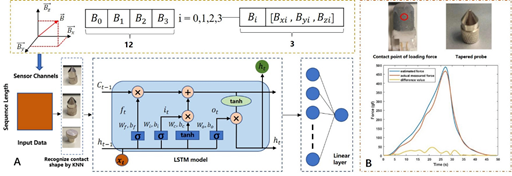
接触力感知标定方法
受过训练后的 LSTM 预测接触力的结果如图中所示。在整个实验过程中接触力和磁场信息非线性的关系下,团队设计的网络依然可以精准的预估输出力的值,滞后问题也得到了缓解。由此可见这个方法,很是可行。
接触位置识别
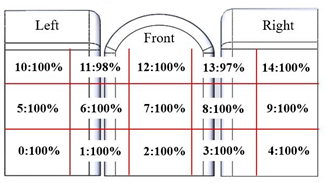
在指尖分类上,研发团队选用了基于KNN方法来进行接触位置的分类检测。这种方法无论是在消耗的时间上亦或是准确率上都令人满意。
实验开始,研究人员们在十五个接触位置使用触头进行随意按压,获得原始的磁场数据对KNN分类器进行训练,然后从每个位置采集100组接触数据,用于验证分类器的性能,结果表明,KNN方法可以准确的识别接触位置。
除此之外研究人员们还搭建了一个实验平台对抓取和感知能力进行了展示,并设计了一组抓取实验,总的来说,颗粒阻塞指尖在完全包围物体时表现出最佳的抓取性能。
来源:中国学者研发超人手功能的软体指尖,磁触觉感知兼具吸附抓取能力-机器人大讲堂
