机器人捕蝇器可以在10毫秒内抓住飞行的蜜蜂!
机器人抓手可以精准捕捉到高速运动10米/秒的乒乓球!
机器人跳蚤能够在0.2 秒内跳到其身高的24倍!
每一个都足够引起科学界的轩然大波,但它们却同时出现在了中科院的实验室里,这背后究竟隐藏着什么秘密?
原来它们都用到了同样的结构——超可调双稳态结构。
▍超可调双稳态结构是什么?
什么是超可调双稳态结构?它居然还能应用在这么多机器人身上!
听着挺玄乎,其实理解起来也不难。把这个词拆开:「双稳态结构」就是具有两种稳定的状态的结构,比如翻盖手机,要么翻开、要么关上。
那当手机既不完全翻开,也不完全关上的时候,就处于一个“中间状态”,只要轻轻一碰,它会立刻回到翻开/关上的状态。
目前,对这种结构的研究多数集中两种稳定状态之间的切换,通过快速切换,可以释放双稳态结构中存储的能量,实现机构的快速响应和力放大,可以提高机器人在多个领域的性能,例如高速运动、自适应传感和快速抓取。

不过这些先前的研究忽略了稳态之间“中间状态”的巨大潜力,中国科学院深圳先进技术研究院(SIAT)李英田博士领导的研究团队,受到凤仙花种子荚的启发,提出了「超可调双稳态结构」,将“中间状态”的潜力发挥到了极致!
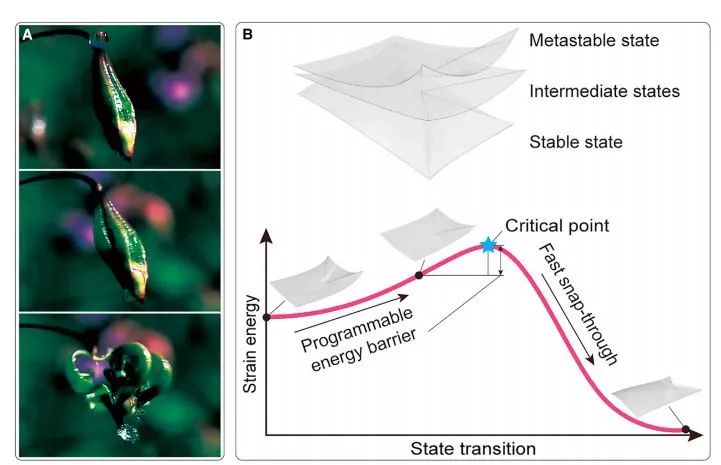
“超可调”其实就是研究团队对这种“中间状态”进行精准可控的触发,而自然界的植物早就具备了这种能力,凤仙花以“自爆”的方式传播种子,只需一点风吹草动就能让张力快速释放,把种子甩飞出去。

受此启发,研究人员又对该结构进一步做了调整,「超可调双稳态结构」具有很有很大的空间,响应产生的力区间可以差出几个数量级!除了能像凤尾花一样对轻微触碰做出快速反应外,还可以设置为不敏感状态,即使受到重击也还能保持原样。
▍折纸艺术拓宽科学边界
理解了超可调双稳态结构的原理,那研究人员具体是如何实现的呢?
是从中国古老的 “折纸”艺术中获得了灵感!
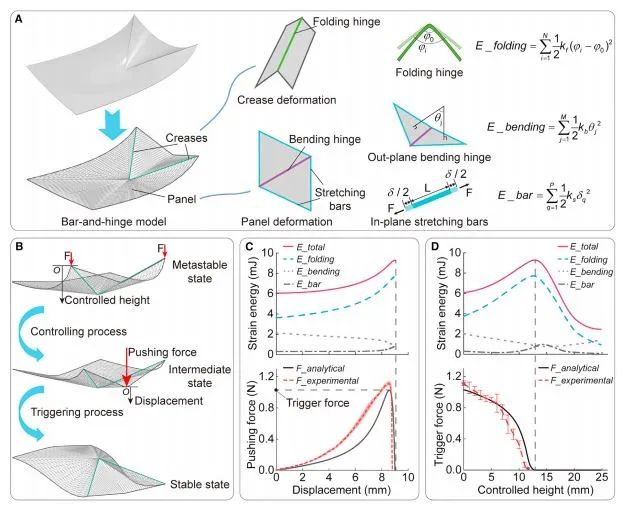
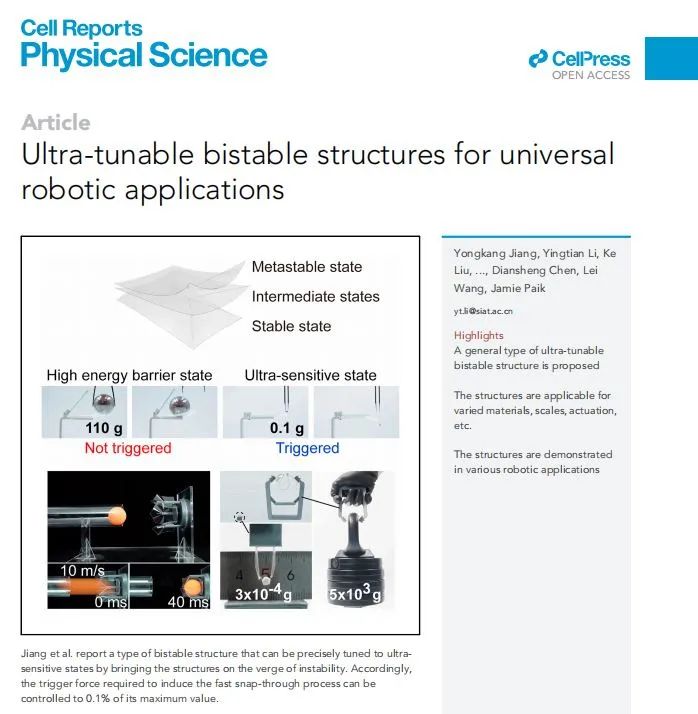
通过将特殊材料的片材折叠成特定的折痕图案,系统具有了稳定状态、亚稳定状态和无数的中间状态。当双稳态结构从其亚稳态转变为稳态时,存在一个临界点,此时存储的应变能达到最大值,同时结构会发生失稳,快速跃变至稳态。
(一滴水就能触发响应)
它的能量壁垒可以人为调控,触发力也是跨数量级可变的,可从最大值调整为最大值的 0.1%。同时,使用不同设计参数制成的机械抓手能夹持的重量差别可达10^7倍!
除此之外,它可以通过多种方式触发,例如直接接触(刚性、柔顺)、间接接触(气动)和非接触(热、磁)等。
还可以根据不同应用场景进行几何构型、尺寸、材料和驱动方法的定制化设计。为了验证该结构在机器人应用上的潜力,研究团队开发了不同的原型样机,包括机器人捕蝇草、机器人抓手,弹跳和游泳机器人、温敏开关和分拣系统等。
具有超灵敏“花蕊”的机器人捕蝇器可以在 10 ms内捉住蜜蜂
机器人抓手分别举起重量为 0.0003 g的泡沫球和5000g 的哑铃
迅速抓住漂浮的气球
由气动结构推动的游泳机器人可以 3 厘米/秒的速度移动
热敏开关:热驱动结构能够显示当前温度,并在温度超过预设阈值时发出警报
▍多所顶尖大学合作完成!
这项科技成就是由中科院联合北京大学、北京航空航天大学、新加坡国立大学以及瑞士洛桑联邦理工学院等几所顶尖高校共同实现的,并发表在《Cell Reports Physical Science》(细胞报告物理科学)期刊中,标题为“Ultra-tunable bistable structures for universal robotic applications”,文章的第一作者为中科院的蒋永康博士。
轻轻一触,瞬间跃变,拥有这样可调控的感知能力,这项研究不仅扩展了机器人的技术边界,也为我们打开了一扇通向未来的大门。
研究团队的带头人李博士表示:“这项工作可以拓宽双稳态结构设计的前沿,并为机器人、生物医学工程、建筑和动力学艺术的未来设计开辟道路。” 让我们拭目以待,期待着这项技术能够创造更多的奇迹!
来源:10毫秒抓蜜蜂! 0.2秒跳至24倍身高!中科院团队巧用新结构!-机器人大讲堂
