
视频赏析
内容摘要
快速性和机动性是无人水下航行器的关键性能指标。本文研发了一种组合仿生推进的水下航行器,其推进器包括1个螺旋桨和4个仿生胸鳍。螺旋桨为航行器提供推力,以保证航行器的快速航行;胸鳍运动能够同时产生推力和侧向力,通过改变运动参数调整侧向力的方向和大小,从而保证航行器的机动性。考虑到胸鳍运动的节律性,本文还设计了基于中枢信号发生器(CPGs)的运动控制算法,并基于此算法开发了用于偏航纠正的反馈控制。在航行器的制作方面,设计了一种紧凑的同轴传动的胸鳍驱动机构,以充分利用航行器尾部的狭小空间。对航行器的巡航和机动性能进行的测试实验表明,在螺旋桨和仿生胸鳍的共同作用下,航行器的综合性能显著提高,能够适用于多种水下任务场景。
图文导读
(一) 本文提出了一种组合推进概念,将螺旋桨推进的快速性与仿生胸鳍推进的机动性结合,设计了如图1所示的水下航行器。其中,螺旋桨负责产生推力 Tpropeller,既可以根据需要选择正转或反转,也可进行精确的转速控制。4只胸鳍在静止并保持零倾斜角时,可配合螺旋桨实现稳定航行;在静止并保持一定倾斜角时,可作为尾舵实现螺旋桨推进时的俯仰和转向机动。当胸鳍对称拍动时,产生推力 Tflippers,实现航行器的前进或后退;当胸鳍非对称拍动时,其产生的侧向力 Lflippers 通过力臂 B 作用于航行器的重心 Ov,实现航行器的俯仰和转向机动。
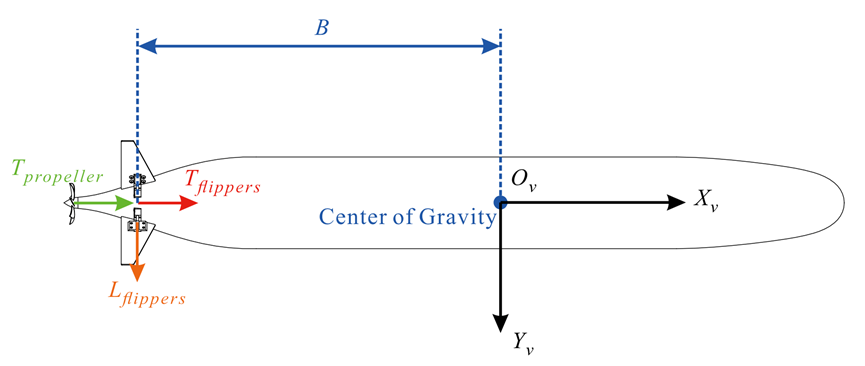
图1 组合推进水下航行器概念设计
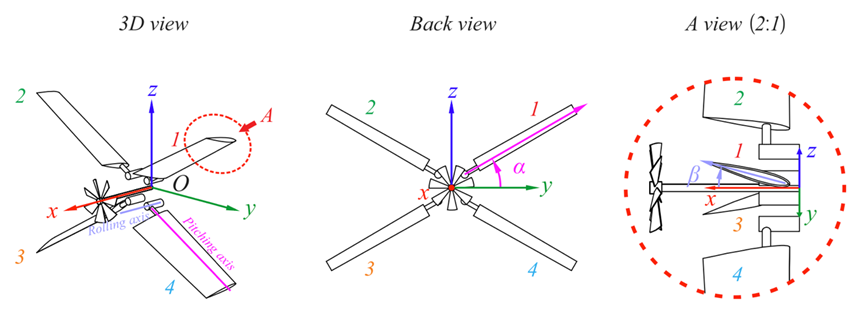
(二) 每个胸鳍的运动包括转动 α 和倾斜 β 两个自由度,如图3所示。
对于仅使用胸鳍的前进、后退、转向(以左转为例)模式,设计了表2中的4种胸鳍动作。
表2 前进(Sailing Forward)、后退(Sailing Backward)、左转(Steering left DS1 & DS2)的胸鳍动作设计
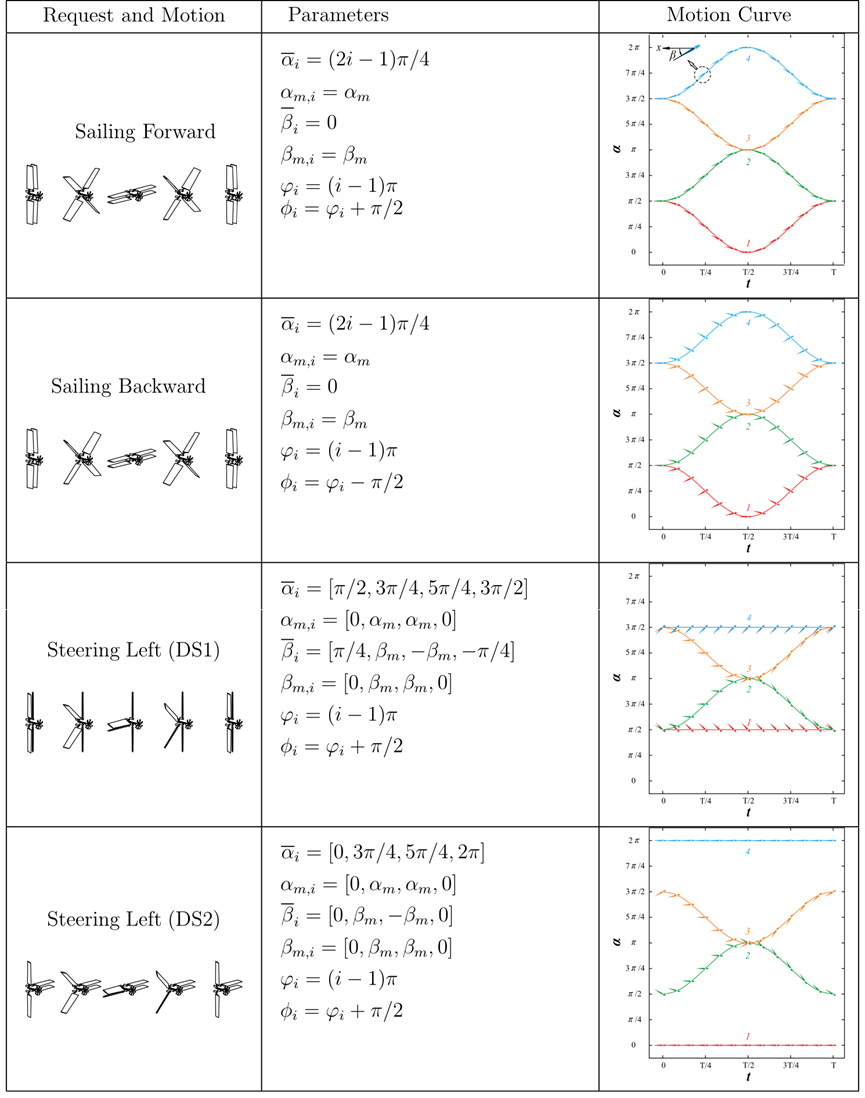
其中,前进和后退时4个胸鳍周期性地对称拍动,两者之间的区别在于倾斜角变化的相位差不同:对于前进,Φi= φi+ π/2;对于后退,Φi = φi- π/2。对于两种左转机动 DS1 和 DS2 ,2号和3号两个胸鳍运动时,其倾斜角变化的平均值不再为零,从而周期性地产生向左的侧向力,实现左转机动。两者的区别在于1号和4号两个胸鳍所保持的静止位置不同:对于 DS1,这两个胸鳍保持竖直并有相对于来流方向的倾斜角,扮演尾舵的角色,在高速时可提供辅助的转向力 ;对于 DS2,这两个胸鳍则保持水平,降低转向阻力,在低速时可实现更小的转向半径
;对于 DS2,这两个胸鳍则保持水平,降低转向阻力,在低速时可实现更小的转向半径 。
。
(三) 航行器的结构设计如图4所示,主要包含以下模块:艇体外壳、防水壳、电源组、控制单元、动力模块、传动模块、四胸鳍推进器和螺旋桨。图4下方显示了放大后的同轴传动机构,其中主要包括转动角驱动轴、倾斜角驱动轴、三连杆机构和伞齿轮箱。
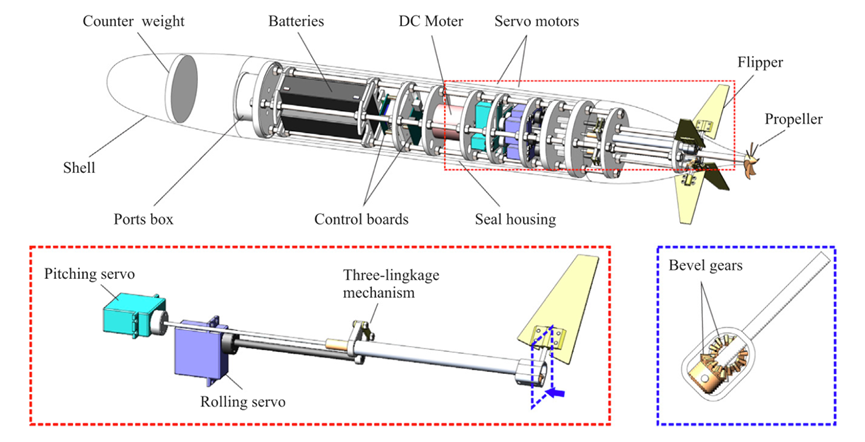
图4 航行器内部结构及同轴传动机构
最终制作出的航行器样机如图5所示。
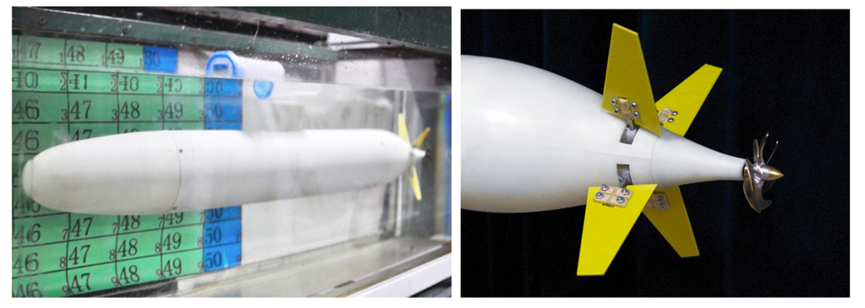
图5 航行器样机
(四) 转动角(αi)和倾斜角(βi)的变化均可以描述为以下方程:θi(t)=xi+Ricos(2Πfit+Φi),其中,i=1,2,3,4时,θi(t) 表示4个胸鳍的转动角,i=5,6,7,8时,θi(t) 表示4个胸鳍的倾斜角。Xi 表示相应角度变化的中间值,Ri 表示相应角度变化的幅度。考虑到胸鳍运动的节律性,建立了如下CPGs方程:
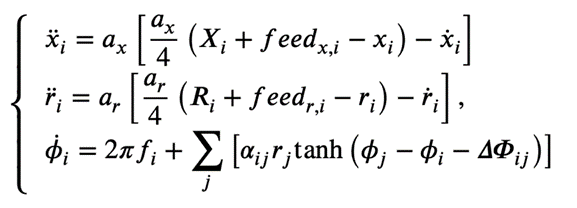
上式中,ax, ar, aij 是用于描述方程收敛速度的常数,feedx,i 和 feedr,i 是用于进行偏航控制的反馈信号, ΔΦtj表示 θi(t) 和 θj(t) 在变化时的相位差。
最终转动角和倾斜角θi,CPG 可用下式计算:θi,CPG=xi+ricos(Φi)。
(五) 对样机进行航行测试使用的环境和方法如图8所示,在水池上方布置网格线,用两个摄像机分别从横向和纵向记录航行器运动的视频,再计算出航行器实时的位置。
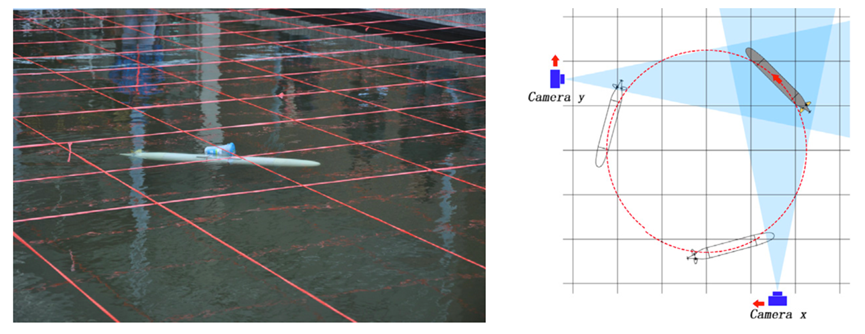
图8 样机航行测试环境和方法
图9展示了航行速度的测试结果。从左图可见:航行器的速度变化与螺旋桨转速和胸鳍运动频率呈正相关;螺旋桨推进的航行速度要高于胸鳍推进的速度,体现出螺旋桨推进的快速性优势,在2000 r/min的转速下达到最高航速0.64 BL/s(0.7 m/s);胸鳍运动时转动角幅度 αm 设定为固定值45°,倾斜角幅度 βm 对于航速的影响比较有趣,在 βm 取中间值30°时航速最快。右图是螺旋桨推进(n = 2000 r/min,蓝色线)和胸鳍推进(βm = 30°时,红色线)时航行器前进和后退的速度对比,可见航行器在使用螺旋桨后退时,速度相比于前进时的折损明显,而使用胸鳍后退与前进的速度差异并不明显,说明胸鳍推进在后退机动时具有更好的性能。
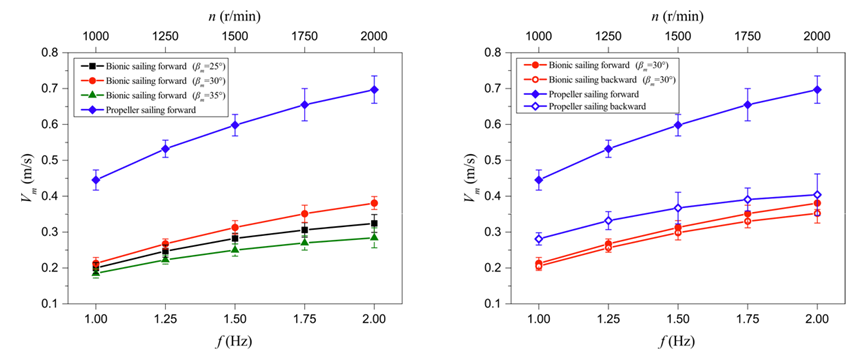
图9 航行速度测试结果
图12是航行器机动性测试结果。其中黑色数据点(SS)代表螺旋桨推进、使用胸鳍作为尾舵进行转向机动,红色数据点(DS1)和绿色数据点(DS2)代表单独使用胸鳍的不对称运动进行转向机动。由图可见,两种仿生转向方式相比于螺旋桨推进尾舵机动都能够达到更小的转弯半径;而在仿生转向时,由于推进速度并不高,所以与将右侧两个胸鳍竖立倾斜作为尾舵的方式相比,将其平行放置能有助于减小转向阻力( DS2的转向半径和回转周期都优于 DS1)。蓝色数据点(CS1)代表螺旋桨推进转向时,使用 DS1 仿生转向提高转向性能,相比于螺旋桨推进、尾舵转向,该组合转向方式能够实现更小的转弯半径和回转周期。粉色数据点(CS2)代表在 DS2 仿生转向时,让螺旋桨反转,减小航行器前进方向的速度,转弯半径相比 DS2 方式进一步减小,几乎实现了原地转向。
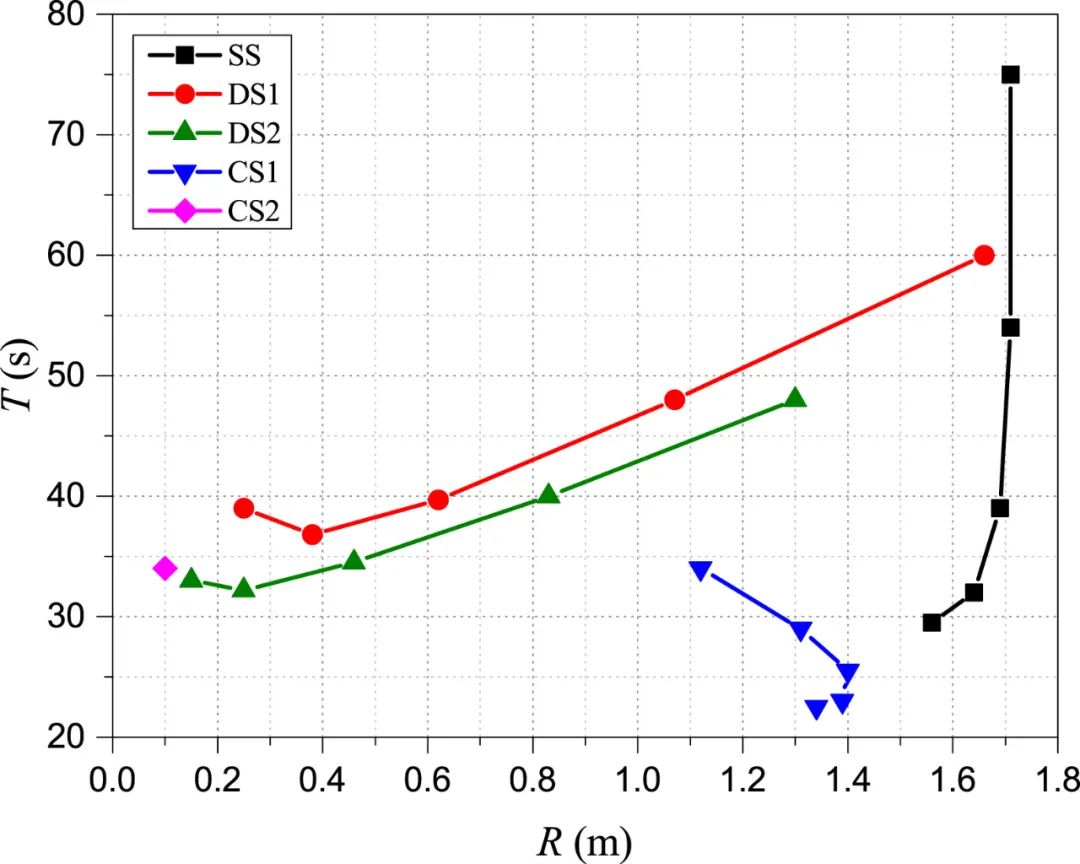
图12 航行器机动性测试结果
综上,为提高无人水下航行器的快速性和机动性,本文提出了组合仿生推进的设计思想与方法,并研制了原理样机。实验表明,组合仿生推进在快速性和机动性上都有比较优秀的表现,为未来无人水下航行器的研制提供了新的思路。
【作者信息】
Dongqi Gao1,Tong Wang1,Fenghua Qin1,*,Shiwu Zhang2,Jun Jing3, Jiming Yang1
1 Department of Modern Mechanics, University of Science and Technology of China, Hefei 230027, China (dongqi@mail.ustc.edu.cn,tongwang@mail.ustc.edu.cn,qfh@ustc.edu.cn,jmyang@ustc.edu.cn)
2 Department of Precision Machinery and Precision Instrumentation, University of Science and Technology of China, Hefei 230027, China (swzhang@ustc.edu.cn)3 China Ship Development and Design Center, Wuhan 430064, China (jjing_csic701@yahoo.com.cn)
* Author to whom correspondence should be addressed: qfh@ustc.edu.cn
【DOI】
https://doi.org/10.1016/j.birob.2022.100072
【全文链接】
期刊信息
Biomimetic Intelligence and Robotics (BIROB, ISSN 2667-3797, CN 37-1527/TP)聚焦仿生智能与机器人领域,主要发表高质量原创理论和应用研究成果,涉及领域包括但不限于:仿生设计、仿生材料、仿生驱动与感知、工业机器人、服务机器人、特种机器人、医疗机器人、微型和纳米机器人、软体机器人、外骨骼系统、机器学习、人机交互、运动学和动力学、运动规划与控制、自主系统、多机器人系统等。期刊接收包括原创研究论文、综述、短篇通讯等多种类型的文章,目前对作者和读者均免费,平均审稿周期30天,诚邀广大学者将高质量的创新成果投稿至本刊。期刊将为仿生智能和机器人领域最具创新性的新发现和最具影响力的应用提供国际交流平台,以促进机器人学、仿生学和人工智能领域的进步和原创贡献。

期刊官网:
https://www.journals.elsevier.com/biomimetic-intelligence-and-robotics
期刊联系方式:
bir@sdu.edu.cn
投稿网址:
https://www.editorialmanager.com/birob/default1.aspx
