
视频赏析
内容摘要
仿生飞行机器人的发展为研究生物的飞行机理提供了新的解决方案。本文设计了一款基于质量位移机构转向的仿蝴蝶扑翼飞行机器人 USTButterfly-II,并采用动作捕捉系统研究其飞行特性。使用平面四连杆机构驱动仿蝴蝶扑翼飞行机器人的扑动,引入质量移位机构提出一种创新的无尾转向控制方法,利用多摄像头动作捕捉系统测量 USTButterfly-II 的机翼运动和飞行轨迹,计算瞬时净升力系数和推力系数等难以测量的飞行气动参数。本研究为仿蝴蝶扑翼飞行机器人的设计和改进提供了有效的数据支持,也为生物蝴蝶飞行机理的研究提供了理论支持。
图文导读
(一)如图1所示,USTButterfly-II 由扑翼驱动结构、转向控制机构以及仿生柔性机翼组成。其中,扑翼驱动结构包括无刷电机、减速齿轮箱和平面四连杆机构,转向控制机构包含无刷电调、飞行控制板和电池。本文将聚氯乙烯薄膜和碳纤维杆作为柔性机翼的构建材料,并采用3D打印件连接碳杆构成仿生翅脉。
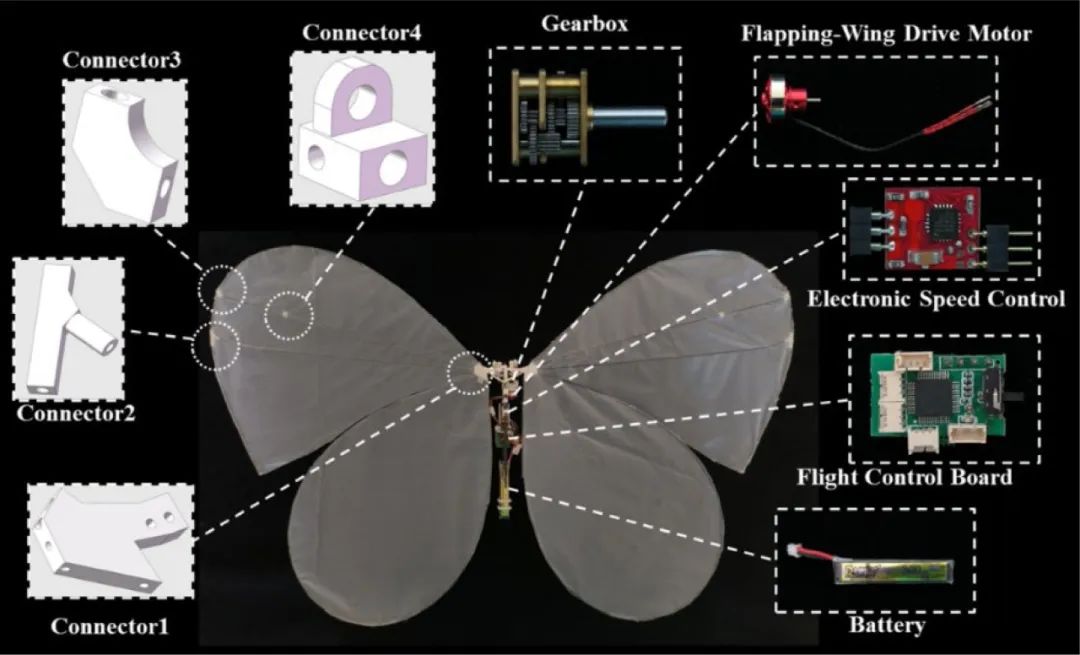
图1 USTButterfly-II 结构组成
扑翼驱动子系统采用平面四连杆机构,通过双摇杆使机翼周期性扑动,图2和图3分别展示了扑翼驱动机构的组成及原理。为减轻重量,齿轮由聚缩醛树脂制成,摇臂、连杆和框架部件由尼龙PA11制成。除金属变速箱外,其它部件都采用3D打印制造。

图2 USTButterfly-Ⅱ 扑翼驱动结构
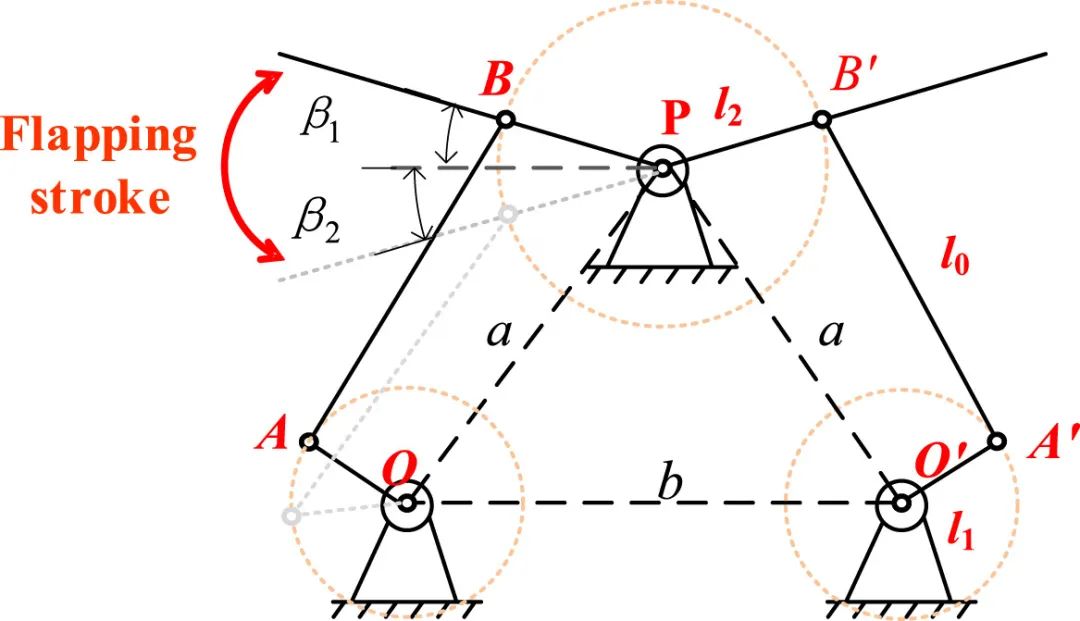
图3 扑翼驱动结构原理示意图
转向控制机构采用创新性的质量位移控制方案,实现无尾偏航控制。如图4(a)所示,转向机构通过控制舵机转动实现 USTButterfly-II 的质心偏移,进而产生滚转力矩使机身滚转,使得左右翅升力的水平分量产生偏航力矩,实现无尾转向。图4(b)展示了偏航力矩的产生机理。图5为 USTButterfly-II 室内盘旋飞行控制实验,实验验证了质量位移转向机构的有效性。
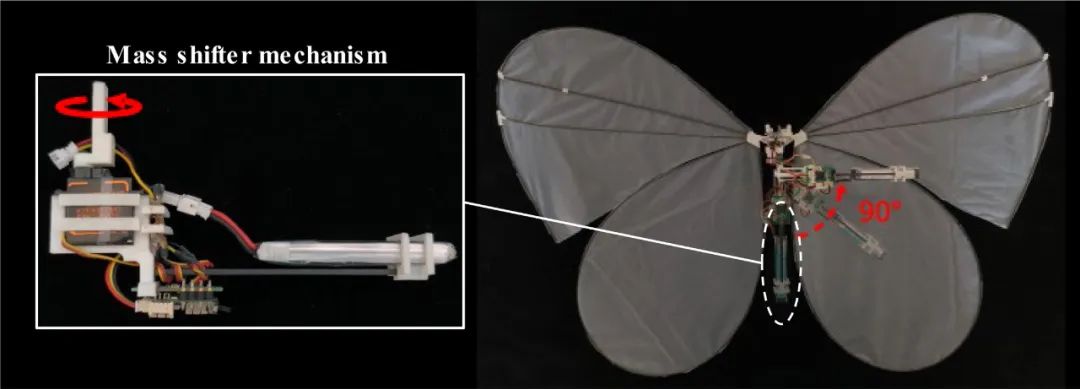
(a) 质量位移转向机构
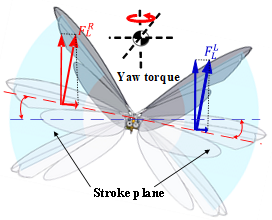
(b) 偏航力矩产生原理
图4 质量位移转向机构及其偏航力矩产生原理
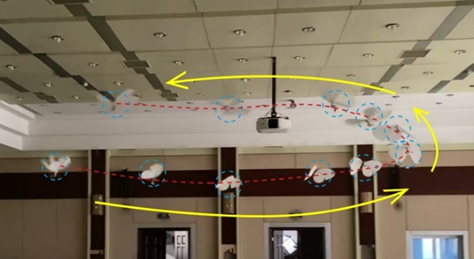
图5 室内盘旋飞行控制实验
(二)本文基于多摄像头动作捕捉系统平台,提出了一种用于 USTButterfly-II 飞行特性表征的实验框架,包括实验设计与数据后处理两部分。实验选取 Optitrack 动作捕捉系统作为实验设备,采用14个红外摄像头以矩形对称排布方式覆盖85 ㎡的捕捉面积,如图6所示。根据荧光标记物的重量和捕捉率选择反光球和贴纸的组合,同时考虑柔性机翼形变优化粘贴位置。反射标记的粘贴位置如图7所示,各标记的属性如表1所示。

图6 Optitrack动作捕捉系统实验场地
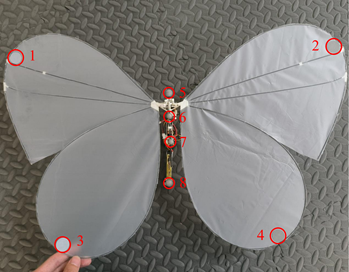
(a) 机体背部标记点
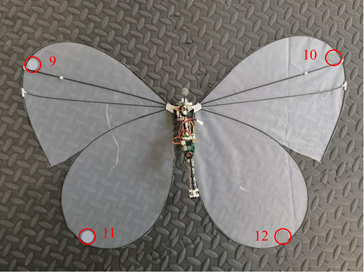
(b) 机体腹部标记点
图7 荧光标记点粘贴位置
表1 荧光标记点属性

在数据后处理阶段,根据动捕系统输出的标记点三维空间坐标,定义并计算典型飞行参数,定量描述 USTButterfly-II 的飞行特性。首先根据地面坐标系 OXYZ 解算机体坐标系 ObXbYbZb(图8),得到三轴姿态角记录机体飞行姿态,然后根据翅膀标记点坐标对前后翅扑动角度进行计算。在此基础上,结合运动学方程得到机体质心点瞬时速度与加速度,通过坐标变换映射到机体坐标系,计算瞬时攻角,经受力分析得到瞬时升推力及升推力系数 CL,t 和 CT,t。定义平均飞行速度V、推进效率 Radvance 和上升角γascent 3个指标量化 USTButterfly-II 在整个飞行阶段的飞行性能。
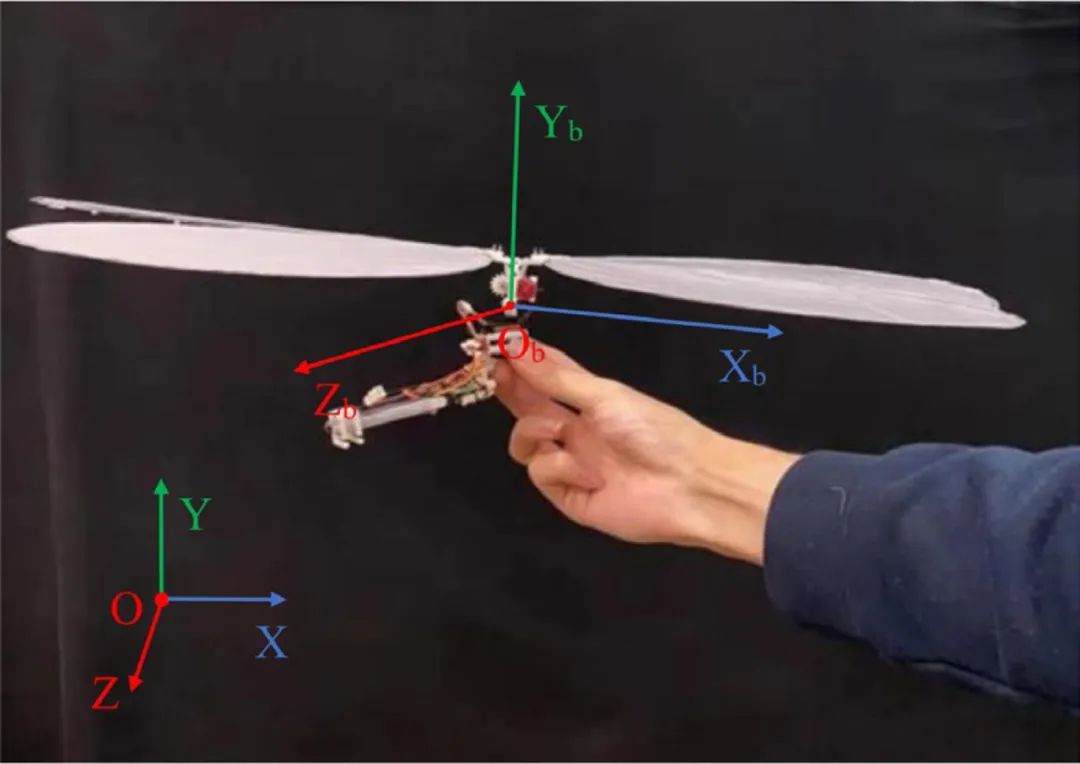
图8 地面坐标系与机体坐标系的定义
(三)基于上述实验框架,对设计的 USTButterfly-II 展开动捕实验,收集机体荧光标记点的位置信息,采用三次多项式插值补充丢失的标记点,并进行数据后处理得到标记点的轨迹。
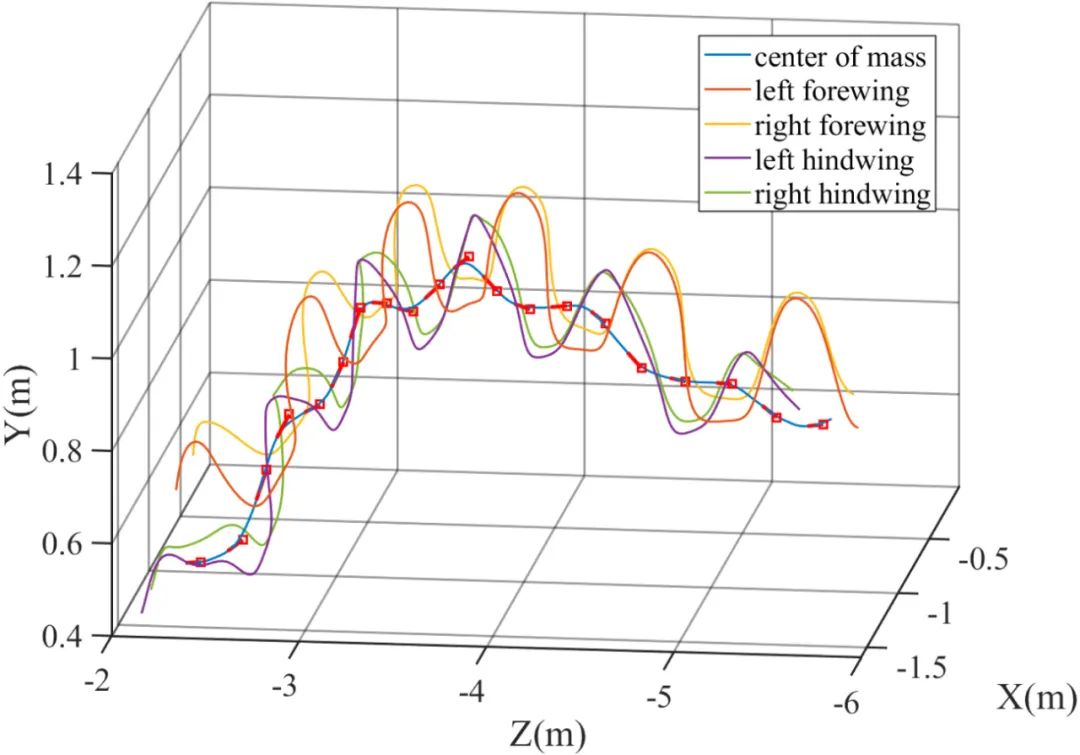
图9 质心与机翼标记点的轨迹
图9展示了质心与机翼标记点的轨迹,红色箭头表示当前位置下质心点的速度矢量。整个飞行过程大约持续6个机翼扑动周期。前3个扑动周期为爬升阶段,扑动频率为4.4 Hz,上升角为21.8°;后3个扑动周期为下降阶段,扑动频率为4.8 Hz,上升角为-13.9°。这一实验表明,升力并不总是与扑动频率正相关,而前翼的下冲程与机体波动的上冲程对应,说明机翼下冲程为升力的主要产生阶段。
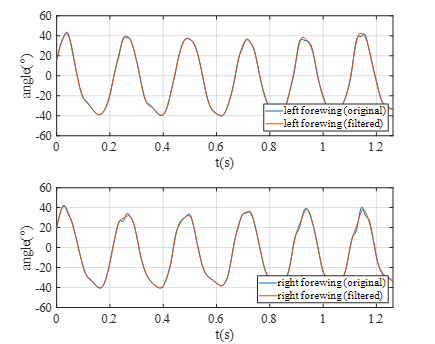
(a) 前翼扑动角度
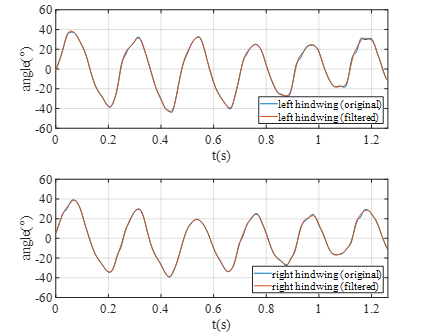
(b) 后翼扑动角度
图10 机翼扑动角度变化
如图10所示,扑动角度呈正弦波动,峰值约为40°,左右翼的扑动角度几乎相同。由于前翼和后翼的形变不同,后翼与前翼的扑动之间存在0.05 s的时滞。同时,因设计的后翼柔性更强,整个飞行过程中后翼的振幅随飞行姿态角的改变不断发生变化,且在爬升阶段其振幅大于下降阶段,这与作用在机翼上的气动力大小密切相关。这些发现表明后翼的功能类似于仿鸟扑翼飞行机器人的尾部,可以通过调整后翼的柔性来控制 USTButterfly-II 的运动。
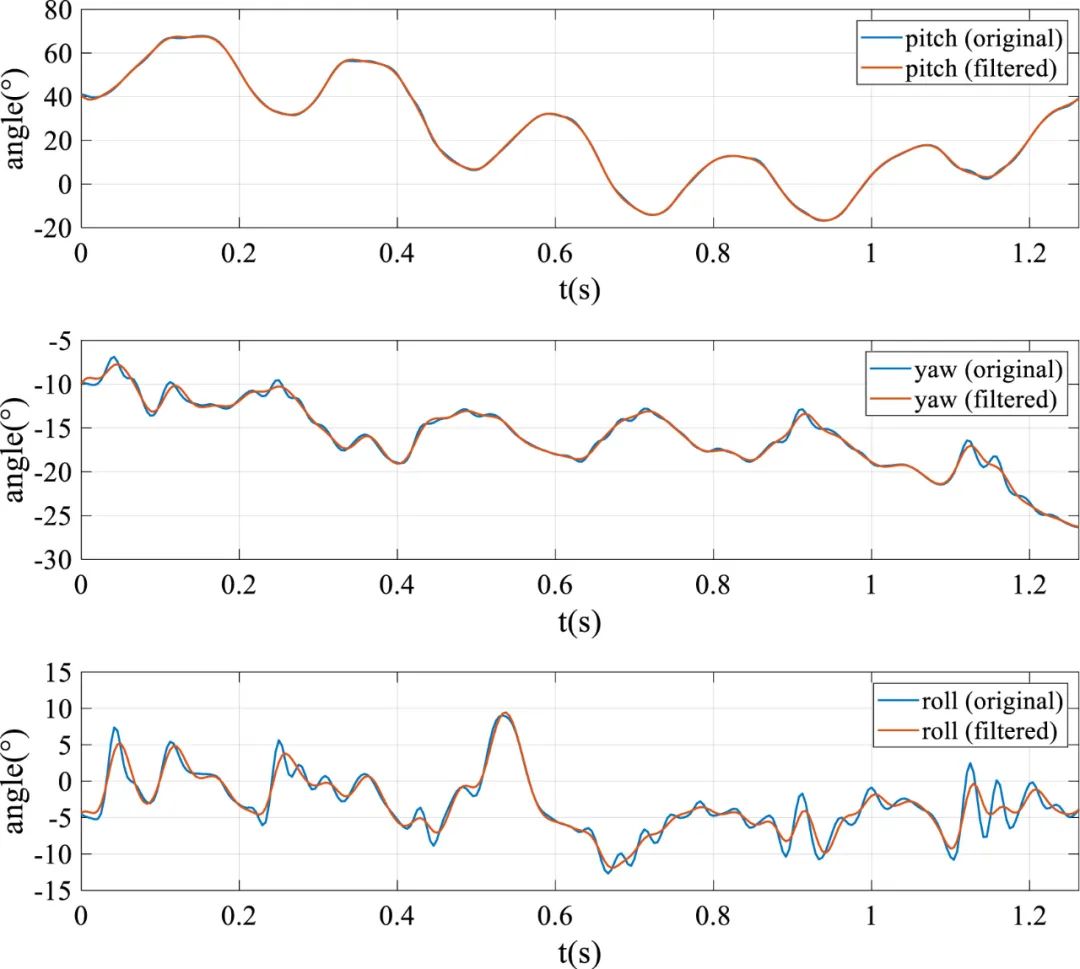
图11 三轴姿态角变化
姿态角变化如图11所示。俯仰角呈正弦波动,且在前翼的下冲程增大,在上冲程减小,表明俯仰角与前翼扑动角基本反相。在爬升阶段,俯仰角在40°左右波动,机身明显抬头;在下降阶段,俯仰角在0°附近波动,说明机身基本水平,这与实际飞行轨迹一致。

图12 攻角与升推力系数变化
在实验中,USTButterfly-II 的飞行速度和扑动频率没有明显变化,因此重点分析升推力与迎角的关系。图12显示了攻角和升推力系数的变化。攻角在0°到50°范围内波动,尽管升力系数变化存在滞后,但其仍与攻角密切相关,这一滞后可能是由于非定常扑翼气动特性导致的。同时,结合机翼扑动角度变化曲线,升力系数的波峰和波谷分别出现在前翼下冲程和上冲程的起始阶段,说明升力系数的变化与机翼扑动存在明显关联。与升力系数相比,未发现明显的推理系数波动规律。
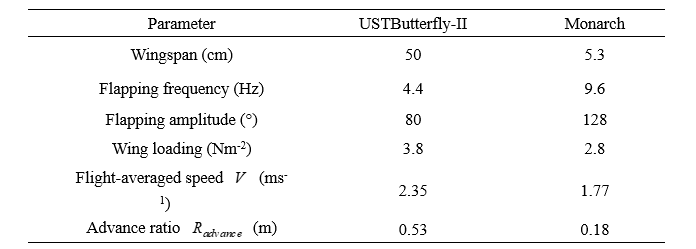
表2列出了 USTButterfly-II 和帝王蝶的爬升飞行参数。相比之下,USTButterfly-II 的扑动频率和扑动幅度明显低于帝王蝶,但其翼载荷、平均飞行速度和推进效率明显大于帝王蝶,这可能与其较大的尺寸相关。
表2 USTButterfly-II 和帝王蝶的爬升飞行参数
【作者信息】
Haifeng Huang1,2,Wei He1,2*,Ze Chen1,2,Tao Niu1,2,Qiang Fu1,2
1 School of Intelligence Science and Technology, University of Science and Technology Beijing, Beijing 100083, China
2 Institute of Artificial Intelligence, University of Science and Technology Beijing, Beijing 100083, China* Author to whom correspondence should be addressed: weihe@ieee.org
【DOI】
https://doi.org/10.1016/j.birob.2022.100076
【全文链接】
期刊信息
Biomimetic Intelligence and Robotics (BIRob, e-ISSN 2667-3797, p-ISSN 2097-0242, CN 37-1527/TP)聚焦仿生智能与机器人领域,主要发表高质量原创理论和应用研究成果,入选2019年“中国科技期刊卓越行动计划”高起点新刊类项目(第一批)。
涉及领域包括但不限于:仿生设计、仿生材料、仿生驱动与感知、工业机器人、服务机器人、特种机器人、医疗机器人、微型和纳米机器人、软体机器人、外骨骼系统、机器学习、人机交互、运动学和动力学、运动规划与控制、自主系统、多机器人系统等。期刊接收包括原创研究论文、综述、短篇通讯等多种类型的文章,目前对作者和读者均免费,平均审稿周期30天,诚邀广大学者将高质量的创新成果投稿至本刊。期刊将为仿生智能和机器人领域最具创新性的新发现和最具影响力的应用提供国际交流平台,以促进机器人学、仿生学和人工智能领域的进步和原创性贡献。

期刊官网:
https://www.journals.elsevier.com/biomimetic-intelligence-and-robotics
期刊联系方式:
bir@sdu.edu.cn
投稿网址:
https://www.editorialmanager.com/birob/default1.aspx
