提到飞行机器人,很多人首先想到的是在室外捕捉优美镜头的航拍无人机。


或者是为干饭人服务的无人配送飞行机器人。


尽管飞行机器人已经广泛应用到我们的日常生活中,但其活动范围仅限于室外开放环境。因为现有的飞行机器人通常体积较大,而且碰撞往往会对机器人造成不可逆的损伤。
相比之下,自然界中一些具有飞行能力的昆虫在进食、躲避天敌、授粉和构建巢穴等任务中表现出了非凡的机动性和灵活性。例如,一只果蝇可以轻松倒立在天花板上,被雨滴击中的蚊子可以在0.2 s内迅速恢复稳定。

受这些生物的启发,研究者们已设计出具有类似飞行能力,如快速转弯、快速避障、碰撞感应和碰撞恢复的拍翼式微型飞行机器人,但这些飞行机器人的尺度仍然比较大(10-200 g)。
微尺度飞行机器人是仿生机器人领域的一个重要分支,MIT助理教授陈宇峰近期研发了一款与蜜蜂重量相当的飞行机器人,它的重量只有0.6 g,体积约一个盒式磁带大小。该机器人由4个相同的模块组成,每个模块由机身、机翼、变速器、1个新型电介质弹性驱动器和1对机翼铰链组成。得益于精心设计的驱动器,这个昆虫大小的飞行机器人有高达2.2:1的升重比和70 cm/s的上升速度。除了可控的悬停飞行功能外,它还能实现空翻动作以及碰撞恢复。该研究成果以 Collision Resilient Insect-Scale Soft-Actuated Aerial Robots With High Agility 为题刊登在 IEEE TRANSACTIONS ON ROBOTICS(2021年37卷第5期)。

图1 微尺度飞行机器人的设计与构造
▍机器人的心脏:电介质弹性驱动器
要想将飞行机器人缩小到较小的尺度(<1 g,<1 cm),飞行机器人驱动器的设计是关键。随着尺度的缩小,传统的电磁驱动器的功率密度和效率将大幅降低,无法提供足够的动力供飞行机器人升空飞行。目前的解决方案大多是使用压电驱动器代替电磁驱动器,装备有压电驱动器的机器人已经具备了可控飞行、机载激光以及水空混合等多功能运动。虽然这类机器人已经具备了复杂的飞行能力,但它们都无法处理飞行中的碰撞问题,这一缺陷主要是由推杆的低断裂强度(120 MP)和失效应变(0.3%)造成。例如,当机器人机翼在飞行过程中撞到障碍物时,碰撞的冲击力会通过机器人的传动装置传到推杆上,最终使推杆变形并失效。为了设计一个能够从碰撞中恢复的机器人,陈宇峰团队设计了一种新型的电介质弹性驱动器。该驱动器由被卷成圆柱体的多层橡胶组成,橡胶的长度、宽度和厚度分别为8 mm、50 mm和210 μm。橡胶圆柱体上涂有碳纳米管,两端由碳纤维帽连接。当对碳纳米管施加电压时,它会产生静电力挤压并拉长橡胶圆柱体。反复的伸长和收缩性能使无人机的机翼每秒拍打可达500次。新型的电介质弹性驱动器具有高功率密度(1.2 kW/kg)和相对较高的传导效率(37%),使机器人具有强大的动力和碰撞恢复的能力。
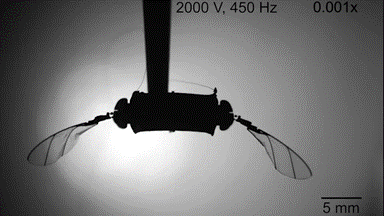
图2 新型驱动器为机器人振翅提供动力
图3 电介质弹性驱动器的共振、自由位移和阻断力的特征分析
▍杂技表演:碰撞恢复和空翻
该机器人可以通过反馈控制从飞行中的碰撞中恢复过来。当机器人在设定点附近悬停时,用碳纤维棒撞击机器人的躯干来模拟碰撞。被撞后,机器人的高度0.35 s内减少了4 cm,然后机器人成功恢复到悬停的设定点。

图4 机器人轻微碰撞恢复过程
当用更大的冲击力撞击机器人时,碰撞导致了机器人的快速下坠以及车身的俯仰旋转。机器人在碰撞后约0.1 s落地,但它在落地后成功恢复了姿态,并最终在碰撞后约1.0 s恢复到悬停设定点。这说明机器人在经历了大的姿态扰动后可以利用地面实现碰撞恢复。
图5 机器人碰撞落地以及恢复过程
新型驱动器为机器人带来的高可控性使得后空翻成为可能。机器人通过反馈控制器来设计可行的翻身轨迹。控制器可以根据机器人的瞬时状态计算出净推力、身体俯仰扭矩和身体滚动扭矩等控制量。这些控制量随后被映射为机器人驱动器的输入电压,最终改变机器人的运动状态。基于这些输入信号可以计算出机器人的运动状态,并将这些信息反馈给控制器。空翻过程由五个阶段组成:起飞、上升、翻转、恢复和悬停。在起飞阶段,机器人从地面升起,在设定点附近盘旋2 s。接下来,机器人以恒定的加速度向上加速。在这个上升的飞行过程中,控制器直接设置净推力,而忽略了对高度和上升速度的要求。在向上加速0.5 s后,机器人进行翻转。翻转阶段被分成旋转加速和减速阶段,以便机器人在完成翻身动作后停止旋转。完成翻转后,控制器进入恢复阶段。在这个阶段,控制器优先考虑姿态稳定,并动态更新设定点位置和速度,使机器人逐渐恢复到原来的设定点。最后,机器人回到其悬停状态,并在设定点附近徘徊,以提醒飞行的结束。
图6 机器人完成空翻过程
▍继往开来:微尺度飞行机器人的创新之路
该文介绍的机器人展示了高度鲁棒的飞行能力,为微尺度仿生机器人的研究提供了新的解决思路。虽然该机器人能够完成一些复杂的飞行动作,但是电介质弹性驱动器需要2000 V的驱动电压,这是压电驱动器所需电压的10倍。考虑到机器人的有效载荷,很难开发出满足上述要求的电力电子设备。未来的研究应该通过减少弹性体层的厚度来降低驱动电压,这可以通过提高旋涂速度或探索其他方法来实现。但值得肯定的是,这种微尺度飞行机器人未来在人工授粉和灾后搜救等领域具有广阔的应用前景。
原文信息:
Chen Y F, Xu S, Ren Z, et al. Collision resilient insect-scale soft-actuated aerial robots with high agility[J]. IEEE Transactions on Robotics, 2021, 37(5): 1752-1764.
下载地址:
https://ieeexplore.ieee.org/document/9357346
作者 | 杜念飞 王超群
编辑 | 唐 秋 郭萌萌
审核 | 许力琴 张 勤
