视频赏析
内容摘要
无人驾驶飞行器(UAV)的自主着陆是一项具有挑战性的任务,尤其是在非结构化环境中的移动平台上。考虑到无人机定位性能是影响UAV着陆的关键因素,本文设计了一套基于增强视觉定位方法的无人机自主着陆系统。采用YOLOv5 m框架提高着陆平台识别的准确度,利用获取的坐标信息结合分层着陆策略,实现无人机自主降落。在不同的风力和光线条件下进行的实验表明,本文提出的系统可以保证无人机实现具有高精度、强适应性和稳健性的降落。在没有外部实时运动学全球定位系统(RTK-GPS)信号的情况下,无人机可以在不同环境中实现精确着陆,平均着陆误差为11.5 cm,与使用RTK-GPS信号的着陆误差相近。
图文导读
无人机自主着陆系统包含二维码检测、二维码识别、数据融合和自主着陆策略,如图3所示。张贴在着陆平台上的标志物具有辅助视觉传感器定位的作用。无人机搭载下视相机,用于采集作业环境图像;通过采用YOLOv5 m框架识别二维码,获取对应的角点坐标,解码无人机的位置;使用卡尔曼滤波器融合位置数据与惯性测量单元(IMU)数据,获得无人机在二维码坐标系下的准确三维世界坐标;结合分层着陆策略,实现无人机自主降落。

图3 无人机自主着陆系统
(一)二维码检测。采用YOLOv5 m对下视相机采集的环境图像进行预处理,在图像中定位并检测二维码的同时输出目标检测框;根据目标检测框将二维码从图像中剪裁出来,实现二维码提取。被阴影遮挡时,二维码特征会受到一定影响,但YOLOv5 m模型仍能准确定位并检测到图像中的二维码,如图4所示。
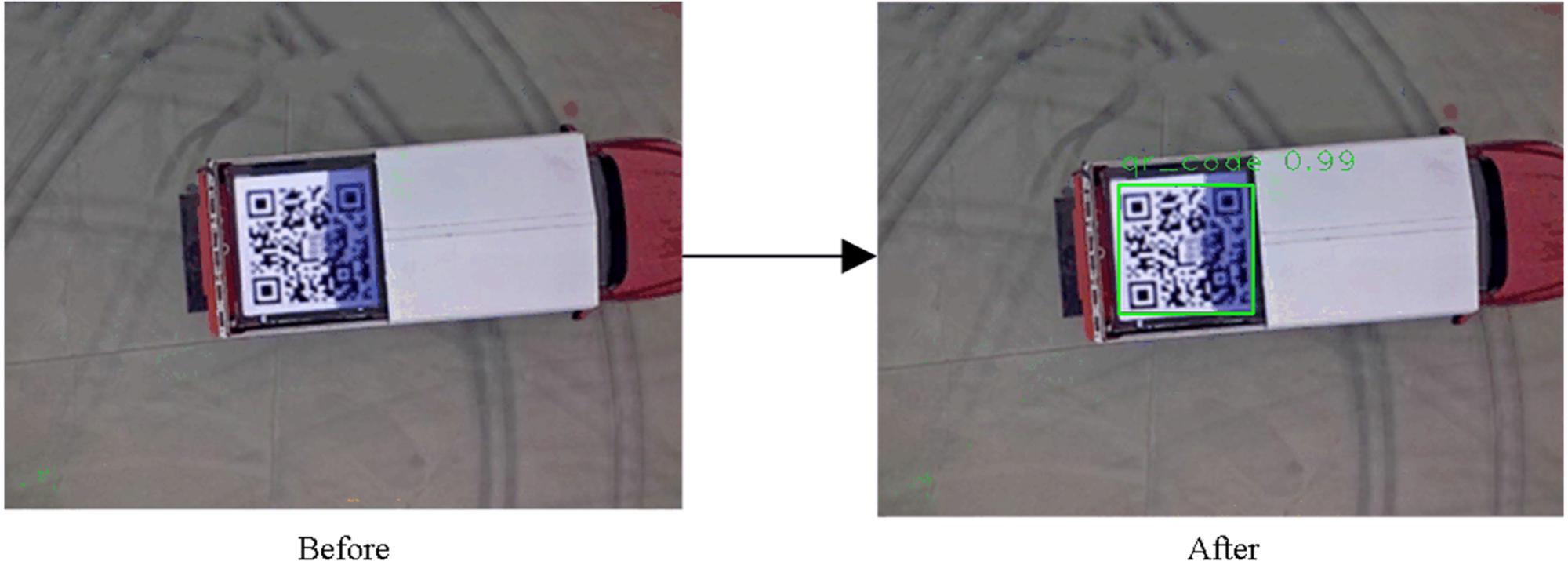
图4 YOLOv5 m对阴影遮挡二维码的检测结果
二维码印刷物表面材质比较光滑,即使在夜晚环境开启补光灯产生的反光干扰下,YOLOv5 m仍能准确检测出二维码,如图5所示。
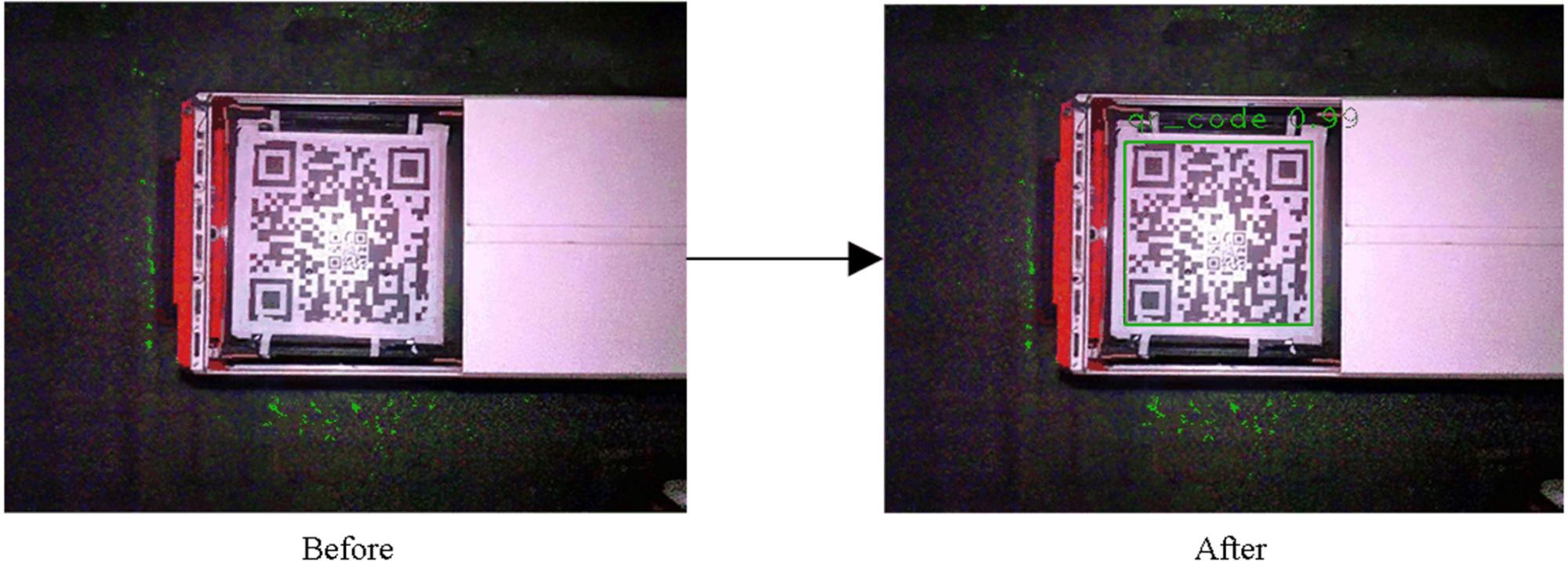
图5 YOLOv5 m夜间对二维码的检测结果
为减少复杂背景环境的干扰,提高二维码识别的准确度和速度,本文根据YOLOv5 m目标检测网络输出的二维码检测框裁剪图像中的二维码,如图6所示。
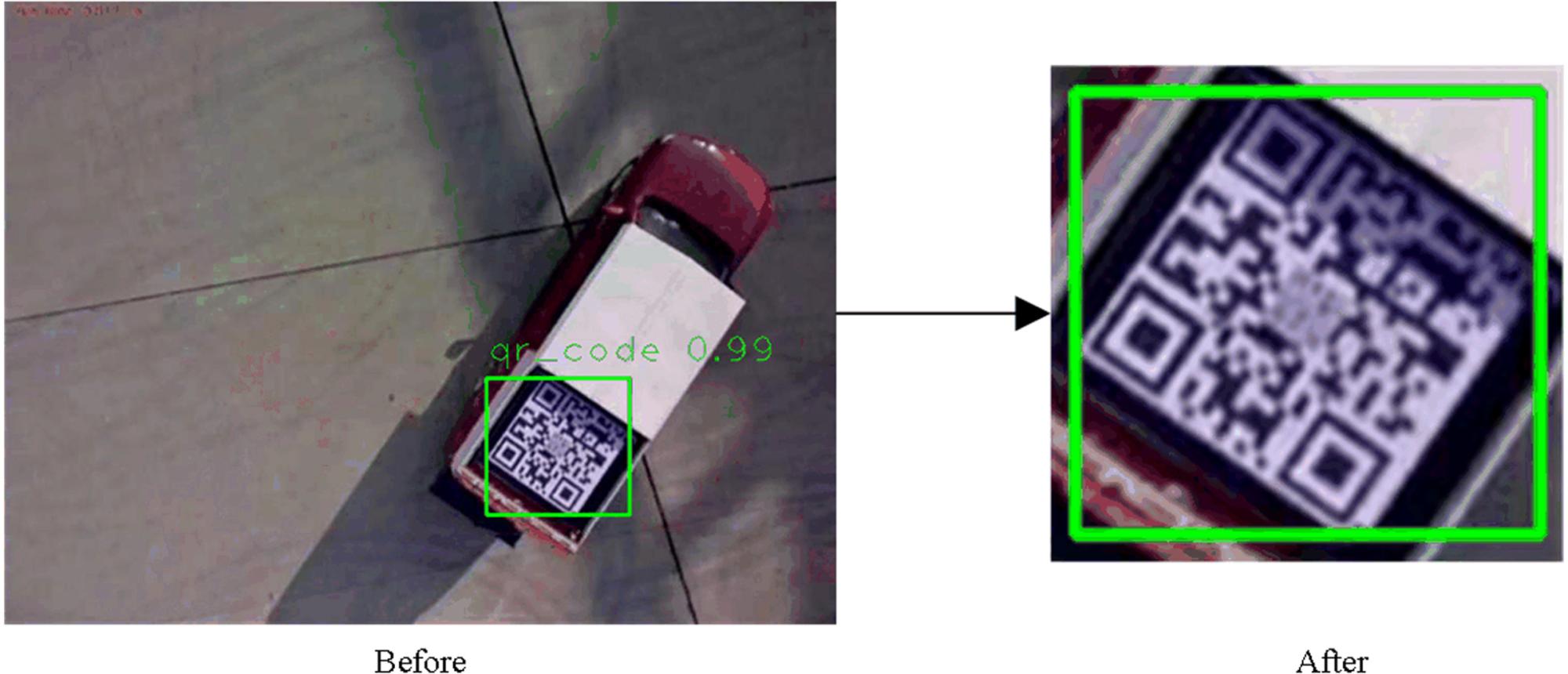
图6 二维码目标提取
(二)二维码识别。通过二维码识别技术进行二维码特征定位和信息识别,获得二维码信息和角点坐标。
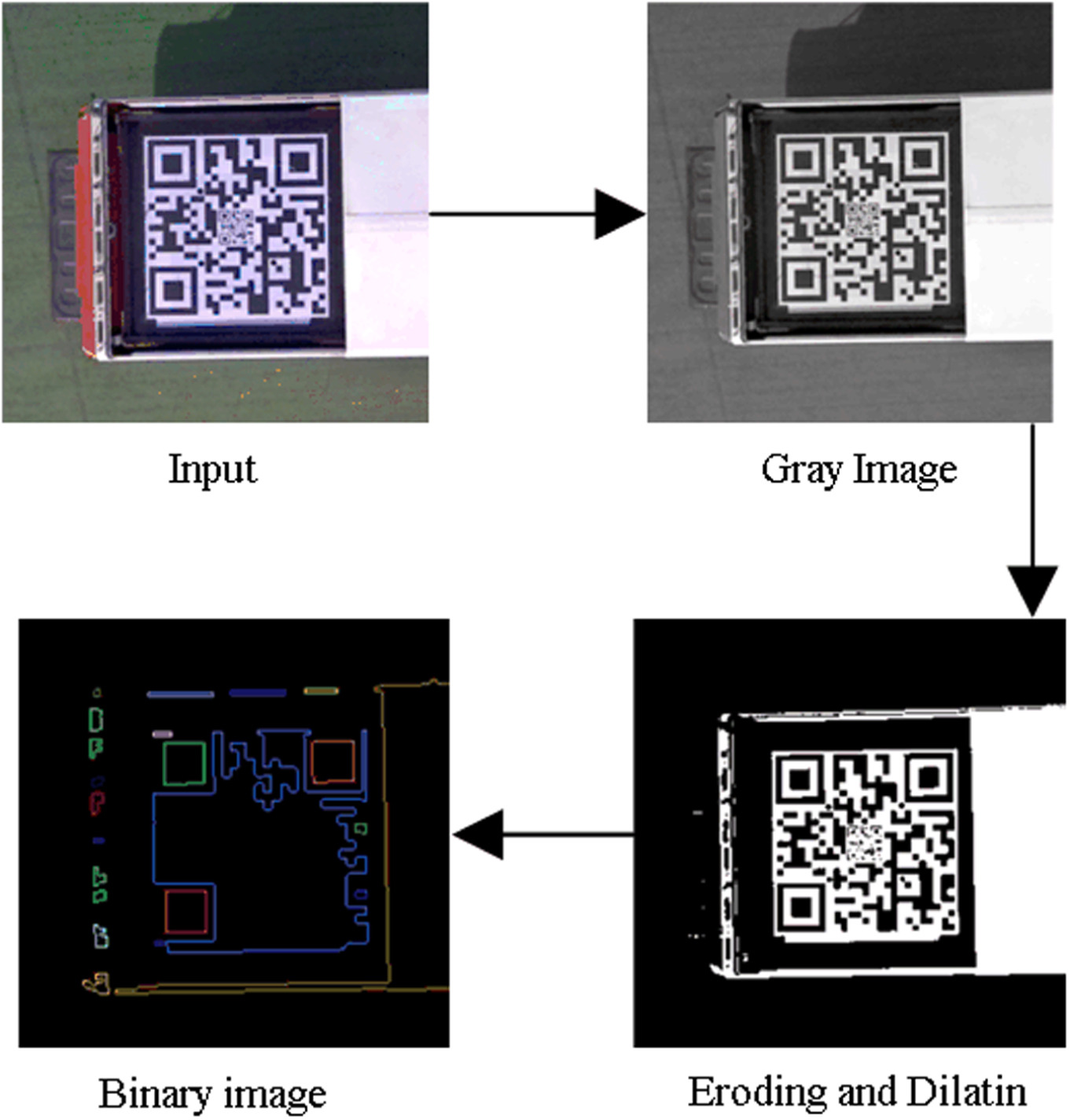
图7 二维码识别流程
(三)数据融合。利用上述步骤输出的二维码角点坐标进行PnP解算,获取无人机位置信息。使用卡尔曼滤波器融合IMU信息和PnP解算可以更加准确地描述无人机运动情况,获取无人机精确的三维世界坐标。无人机在二维码世界坐标系下的x轴位置数据经卡尔曼滤波前后的波形对比如图10所示。
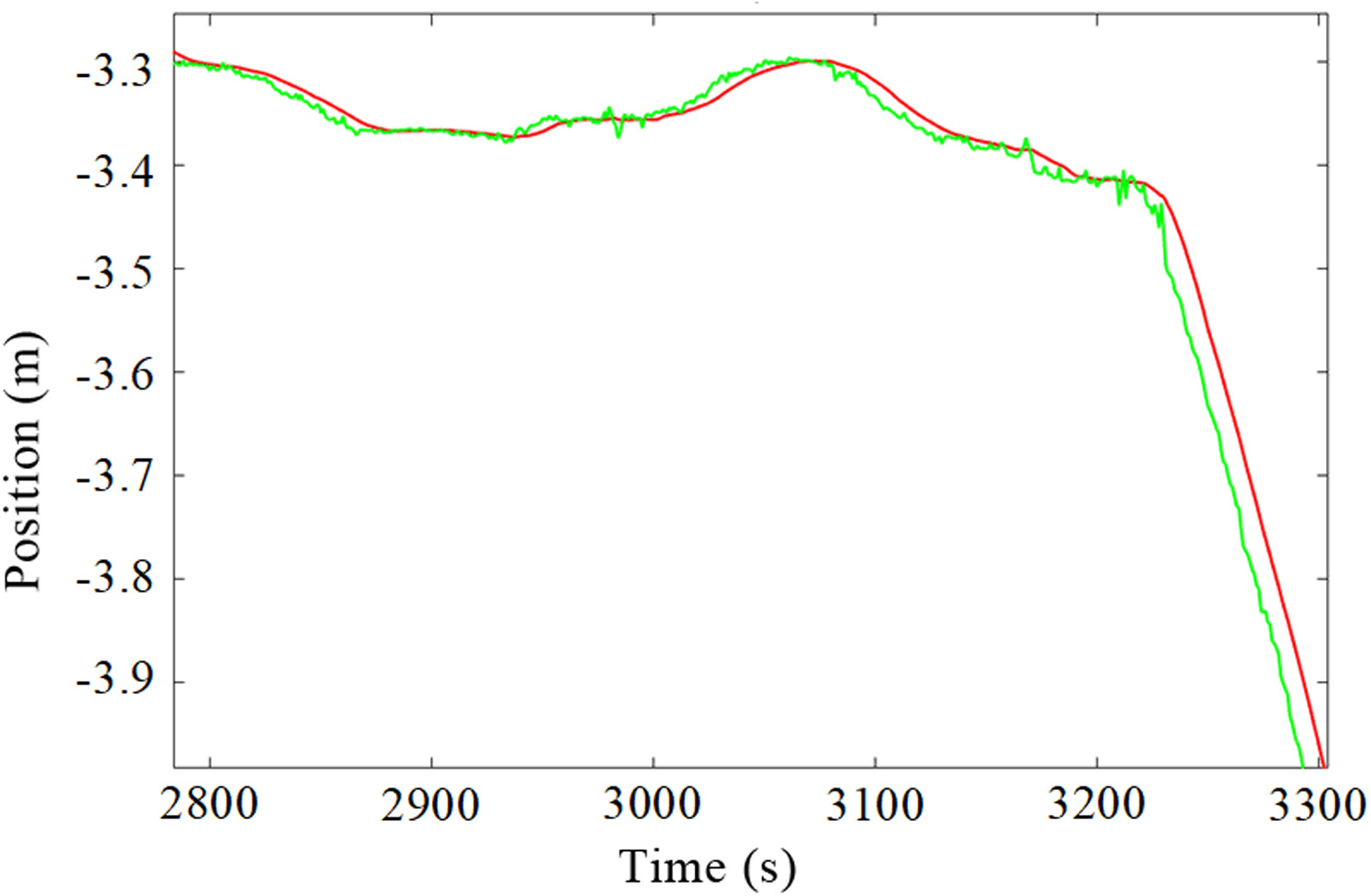
图10 滤波前后的x轴数据
(四)自主着陆策略。无人机在自动起飞前,会记录起飞位置的经纬度,执行完任务后,无人机进入返航模式,自动回到起飞点上方。如图11所示,无人机的返航高度为12 m,无人机搭载的下视相机的水平视场角为90°,垂直视场角为65°,无人机在返航点上方可以通过相机检测到左右约24 m、上下约15.8 m的区域。
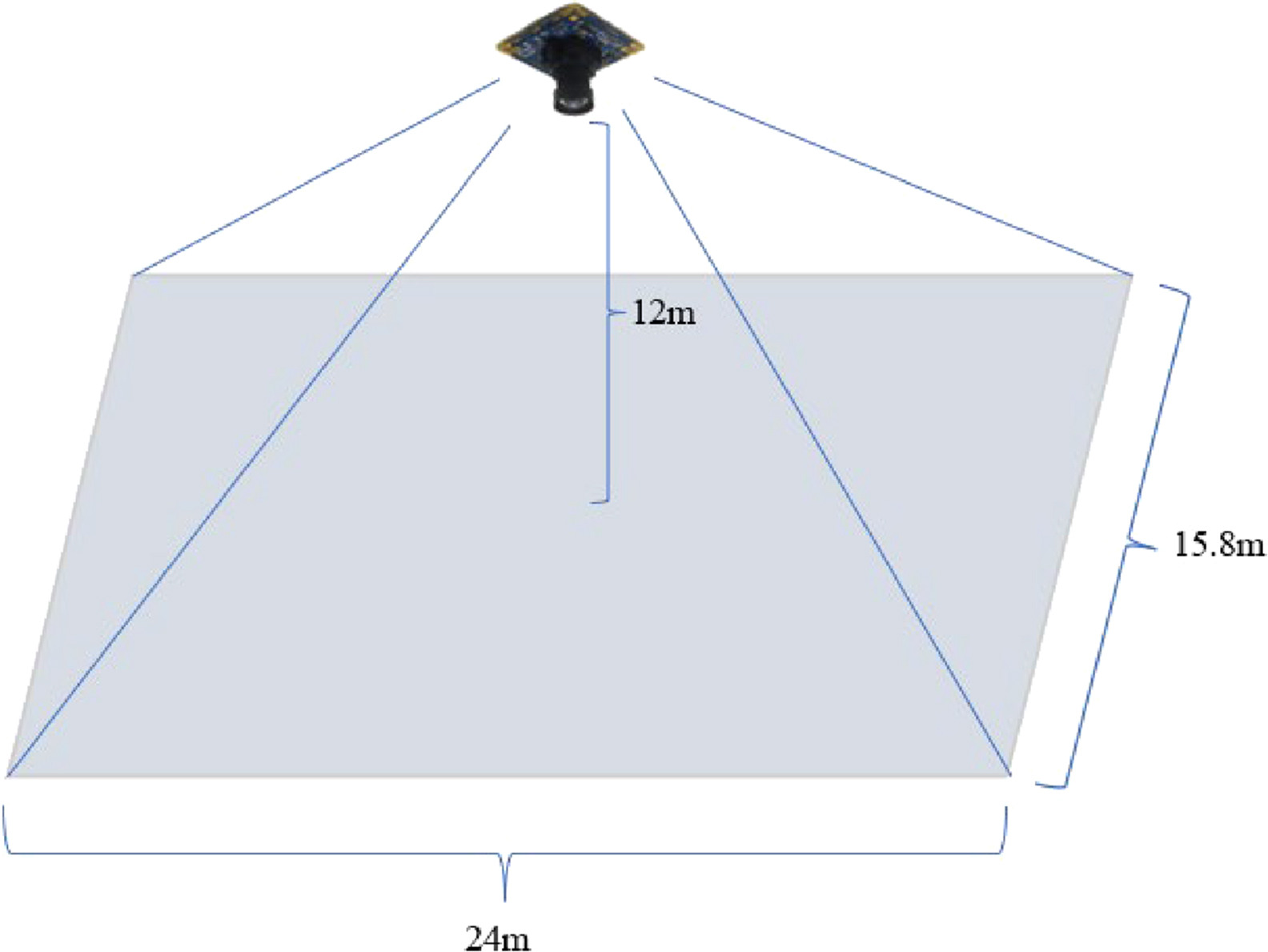
图11 相机视野范围示意图
无人机下降过程的控制策略如图12所示。无人机允许下降的水平偏差与无人机所在高度成正比。若在某个下降高度上,无人机的水平偏差超过了设定值,无人机将停止下降,并调整水平偏差低于相应的设定值后,继续执行下降任务。
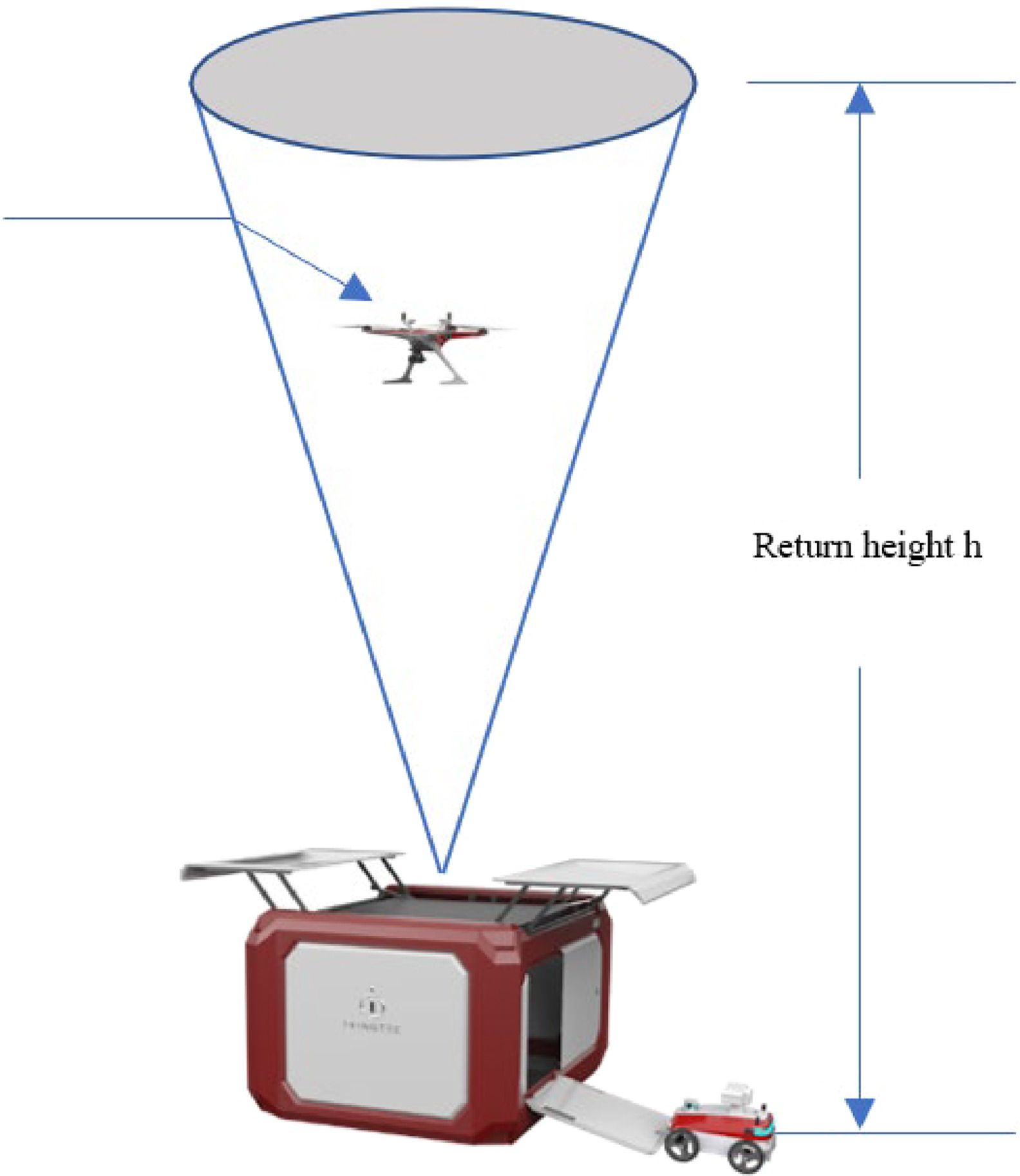
图12 无人机自主降落控制策略示意图
(五)本文选择在不同风力、光照条件下进行飞行测试,验证增强型视觉定位无人机自动化机场全自主降落系统的适应性和鲁棒性。如图14所示,测试采用的四旋翼无人机轴距为550 mm,所有的算法都在该无人机搭载的Nvidia Jetson NX处理器上运行。

图14 无人机降落测试图
综上,本文提出了一个由粗到细的基于增强视觉定位方法的无人机自主着陆系统,实现了在无RTK-GPS信号下的精准降落。实验表明,本文提出的无人机自主着陆系统有较高的准确度和较强的适应性,在实际工业生产活动中具有巨大的应用潜力。
【作者信息】
Qiangqiang Cui1,*, Min Liu2,Xiaoyin Huang3,Ming Gao1
1 IKingtec Intelligent Technology Co., Ltd, Beijing 100089, China
2 State Grid Jibei Electric Power Company Limited, Beijing 100032, China
3 State Grid Jibei Electric Power Co., Ltd. Beijing EHV Power Transmission Company, Beijing 102488, China
* Author to whom correspondence should be addressed: cuiqiangqiang@whu.edu.cn
【DOI】
https://doi.org/10.1016/j.birob.2023.100088
【全文链接】

期刊信息
Biomimetic Intelligence and Robotics (BIRob, e-ISSN 2667-3797, p-ISSN 2097-0242, CN 37-1527/TP)聚焦仿生智能与机器人领域,主要发表高质量原创理论和应用研究成果,入选2019年“中国科技期刊卓越行动计划”高起点新刊类项目(第一批),期刊已被DOAJ和Scopus数据库收录。
涉及领域包括但不限于:仿生设计、仿生材料、仿生驱动与感知、工业机器人、服务机器人、特种机器人、医疗机器人、微型和纳米机器人、软体机器人、外骨骼系统、机器学习、人机交互、运动学和动力学、运动规划与控制、自主系统、多机器人系统等。期刊接收包括原创研究论文、综述、短篇通讯等多种类型的文章,目前对作者和读者均免费,平均审稿周期30天,诚邀广大学者将高质量的创新成果投稿至本刊。期刊将为仿生智能和机器人领域最具创新性的新发现和最具影响力的应用提供国际交流平台,以促进机器人学、仿生学和人工智能领域的进步和原创性贡献。

期刊官网:
https://www.sciencedirect.com/journal/biomimetic-intelligence-and-robotics
期刊联系方式:
bir@sdu.edu.cn
投稿网址:
https://www.editorialmanager.com/birob/default1.aspx
