视频赏析
文章导读
近年来,本文作者一直致力于研发可长时间和长距离执行户外飞行任务的大型和中型扑翼飞行机器人。到目前为止,已制造出约1000架飞行性能稳定的扑翼飞行机器人,用于科学研究、飞行性能测试、庆典晚会的高科技表演等。这些飞行机器人可以分为两种类型:HIT-Hawk和HIT-Phoenix,前者翼展2米,其外观类似鹰,后者翼展2.3米,其外观类似于凤凰。本文介绍了这两种扑翼飞行机器人的仿生概念、理论分析、设计、制造和飞行实验。文章第一节给出了研究背景;第二节简要介绍和总结了鸟类飞行的一些现象和特点,阐述了扑翼飞机和固定翼飞机的异同;第三节研究了扑翼飞行系统的空气动力学建模方法,它改编自经典的薄翼型理论,并用于评估飞行性能;第四节设计了HIT-Hawk和HIT-Phoenix的结构和机理,重点介绍了基于模块化设计的机翼关键结构和总体布局;第五节设计了包含所有航空电子设备和传感器的高度集成机载控制器,实现自主飞行控制;第六节介绍了HIT-Hawk 和 HIT-Phoenix 原型样机和典型飞行试验结果;最后一节为论文总结。
原文摘要
本文作者受大中型鸟类启发,研发出两种翼展超过2米的扑翼飞行机器人,其外观分别类似于鹰和凤凰,因此被称为HIT-Hawk和HIT-Phoenix。本文将详细介绍仿生概念、理论分析、设计与制造。首先,对大中型鸟类的飞行原理及特点进行总结,并基于薄翼型理论对空气动力学进行建模,建立了主要的设计基础。然后,提出HIT-Hawk 和 HIT-Phoenix 的机械结构设计方案,确保了横向和纵向稳定性,并优化了飞行性能。在此基础上,提出自主飞行控制方法并在高度集成的机载控制器上得到实现,其满足对质量、尺寸、功率和形状的严格限制。最后,通过实际飞行实验对制造的样机进行了验证,这两款扑翼机的翼展分别为2.0m和2.3m,起飞重量分别为1.15kg和0.86kg,最大稳定续航时间分别为65min(使用3SLiPo电池,4300mAh)和8min(使用3SLiPo电池,800mAh),它们的抗风能力均可达到4级。与模仿昆虫或小鸟的小型和微型扑翼飞行器相比,本文提出的机器人具备较强的承载能力、抗风能力,续航时间长。
图文导读
在设计仿生扑翼飞机样机时,影响其飞行性能的主要因素包括机翼、动力传输单元和尾翼。在HIT-Hawk和HIT-Phoenix的设计中,为了便于在实验过程中更快地更换损坏的部件,并通过组合匹配不同的结构部件来测试不同部件对飞行性能的影响,作者采用了模块化设计方案。如图10和图11所示,HIT-Hawk和HIT-Phoenix都由四部分组成。在这两组图片的右侧,A是动力传输单元,B是尾部模块,C是机翼模块,E是机身,D是连接A和C的连杆。在HIT Phoenix(图11)中,F是覆盖机身的外壳。外壳的外观和轮廓模仿了中国传统文化中的凤凰形象。HIT Hawk和HIT Phoenix在机械结构和飞行原理上完全相同。
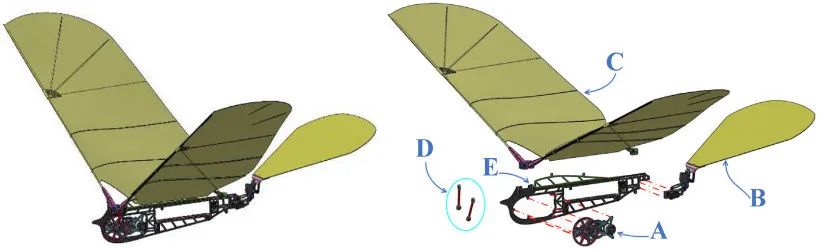
图10. HIT-Hawk的三维装配与零部件布局
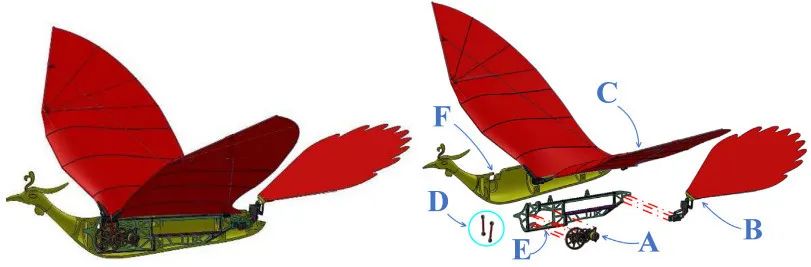
图11. HIT Phoenix的三维装配和零部件布局
图20是飞行控制系统的硬件框架,主要由主控制器和一些外围设备组成。中央黄色模块是飞行控制器的核心模块,包括MCU和MEMS传感器。黄色模块周围的浅蓝色模块是一些必要的外围模块,最外面的绿色模块对应每个外围模块的功能。控制器的核心模块包括两套MCU(一个主处理器和一个从处理器,用于计算所有数据)、MEMS传感器(IMU、磁强计和气压计等,用于提供所有运动源数据)、必要的补充部件(LED、电阻和电容等),整个系统主要负责传感器数据的采集和飞行控制算法的实现。外围设备包括接收远程控制信号的外围接口、串行端口、电源模块、电子速度控制器、数据传输模块、GPS和microSD卡等。它们主要负责与地面站和其他模块的通信。
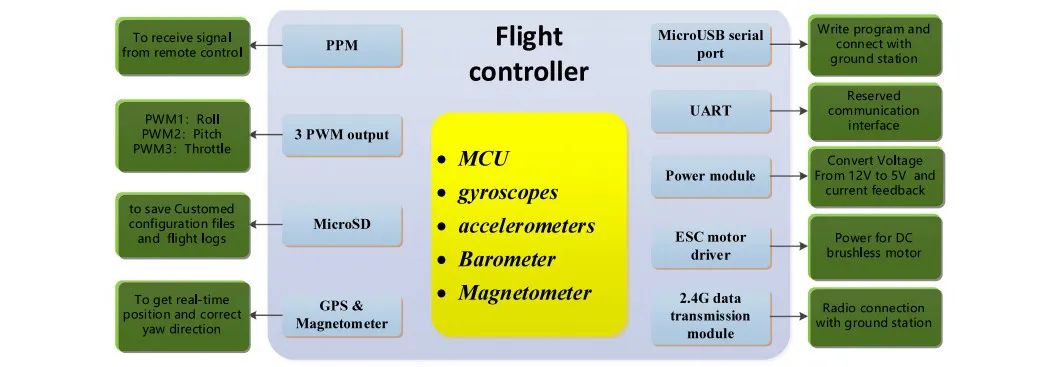
图20.机载飞控系统硬件框架结构图
原文信息
【作者信息】
Erzhen Pana, Hui Xua, Han Yuana, Jianqing Penga, Wenfu Xua,b,*
a The School of Mechanical Engineering and Automation, Harbin Institute of Technology, Shenzhen 518055, China.
b The State Key Laboratory of Robotics and System, Harbin Institute of Technology, Harbin 150001, China.
* Corresponding author, E-mail address: wfxu@hit.edu.cn
【DOI】
https://doi.org/10.1016/j.birob.2021.100002
【全文链接】

