视频赏析
内容摘要
本文作者受到蜈蚣等无脊椎节肢动物足部运动的启发,通过探究多足机器人腿部运动方式和步态规划方法,提出了创新式的腿部运动方法,结合被动体节的几何特征,实现了少自由度多足机器人的全方位运动,并有效地降低了多足机器人的关节数量及驱动器数量。本文将这一设计思路拓展至模块化多足机器人,将有限状态机引入步态设计方法中,最终通过一台十足机器人样机的运动实验有效地验证了该模块化机器人的可拓展性和步态生成方法的有效性。文章的第一节介绍了研究背景;第二节提出了机器人的运动方法和基本概念;第三节将有限状态机概念引入机器人运动步态的生成和转换过程,并成功获得了多足机器人的运动步态序列;第四节介绍了基于十足机器人样机的运动实验结果;最后一节为论文总结。
图文导读
传统的腿足式机器人每条腿通常需要具备至少3个主动自由度,在这种设计下,一般的n足机器人仅仅腿部就需要至少3n个电机,这不仅加大了机器人重量,同时也为机器人的设计和驱动带来困难;有些研究将足式机器人腿部自由度降为1个或2个,同时在相邻的身体体节间设置主动关节用来配合腿部的运动,此时多足机器人仍然需要较多的电机进行驱动,机构成本和复杂度依然较高。
针对上述问题,本文探究多足机器人新的腿部构型和运动方式,如图1所示,该多足机器人由多个模块化体节串联组成,各体节之间通过单自由度被动铰链连接,每个体节有两条腿,每条腿上只有1个沿身体侧向向外“踢腿”的自由度。
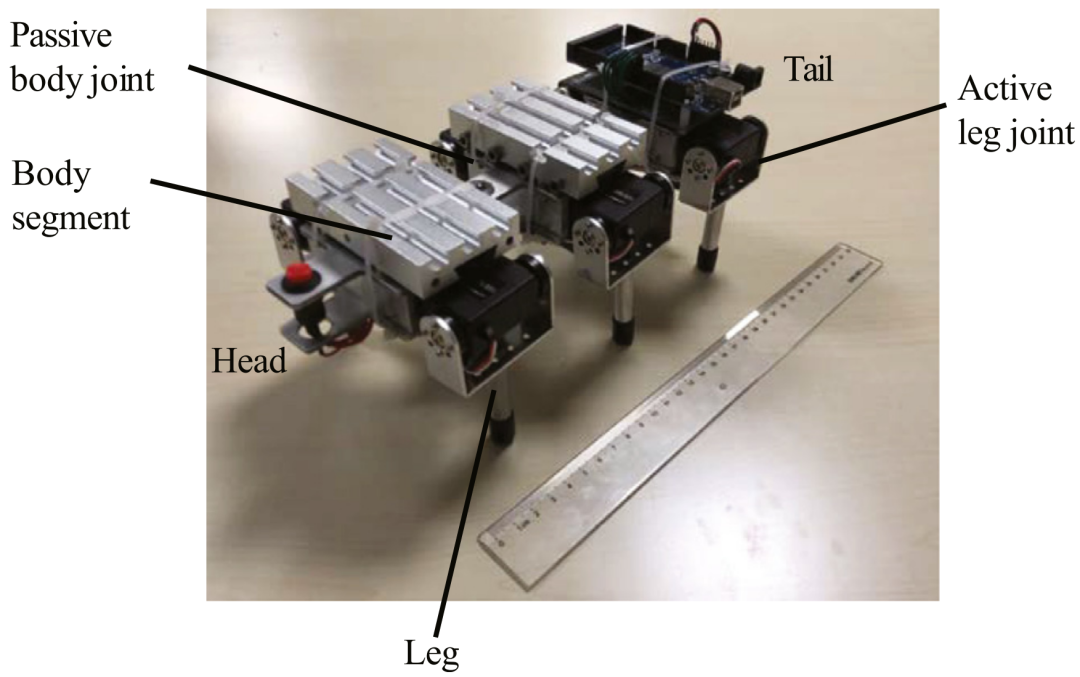
图1. 文中提出的多足机器人样机
机器人利用抬腿时足与地面之间的摩擦力带动身体体节被动关节旋转,改变身体体节的姿态,进而改变落地腿的位置,如图4所示。文章分析了机器人在不同支撑腿分布状况下的能动性,挑选出可以作为步态选项的结构来组成步态序列。通过分析支撑腿和摆动腿之间的周期分布,获得了身体被动关节的转角变化规律。图8给出了文中提出的波动式步态状态切换规律。
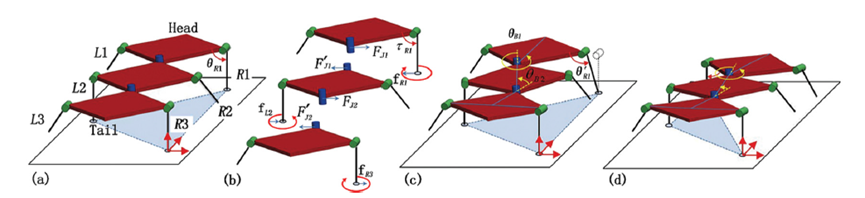
图4. 机器人运动模态示意图
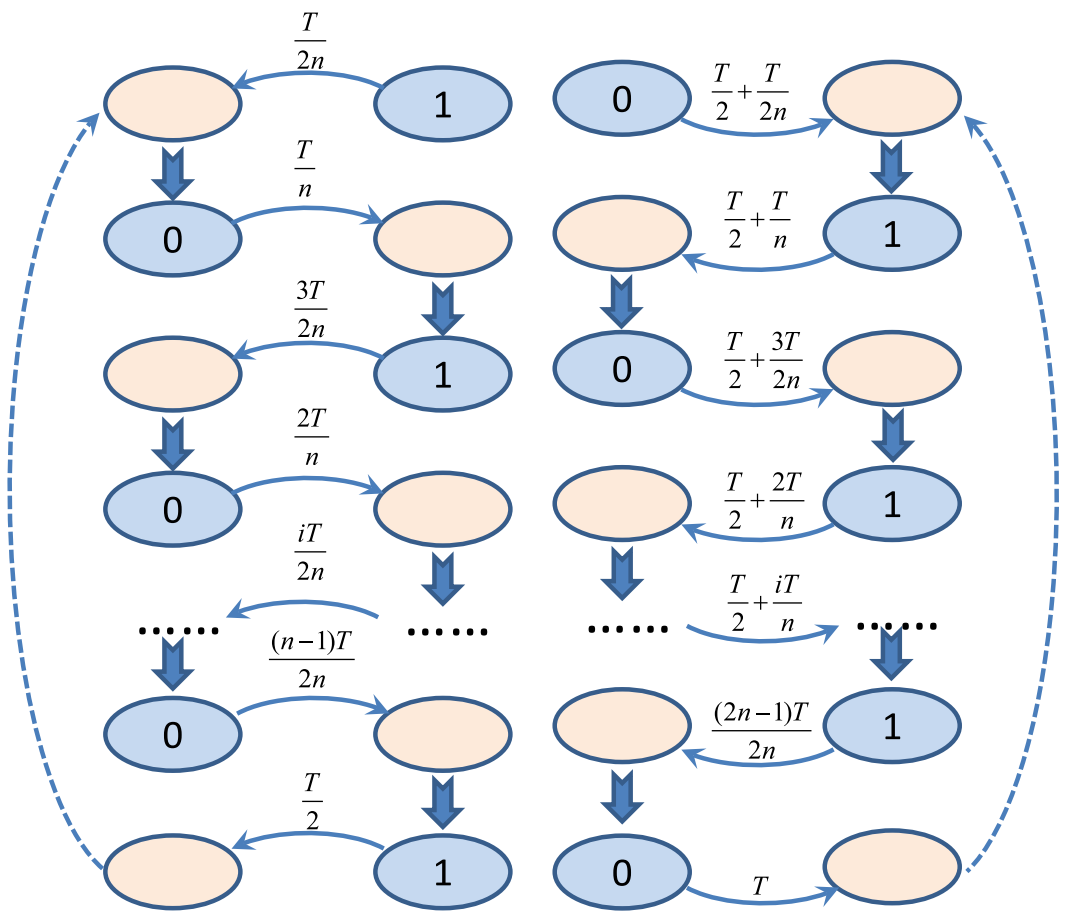
图8. 机器人波动步态状态切换图
该文中提出的机器人构型和运动控制方法可推广至具有2n个腿的机器人平台,下图给出了该类型机器人的设计与应用概念。

【作者信息】
Yongchen Tanga, Guoteng Zhangb, Dingxin Gec, Chao Rend, Shugen Mae
a School of Intelligence and Information Engineering, Tangshan University, Tangshan 063000, China.
b School of Control Science and Engineering, Shandong University, Jinan 250061, China.
c Tangshan Shinh Intelligent Technology Co.Ltd, Tangshan 063000, China.
d School of Electrical and Information Engineering, Tianjin University, Tianjin 300072, China.
e Department of Robotics, Ritsumeikan University, Shiga 5258577, Japan.
【DOI】
https://doi.org/10.1016/j.birob.2021.100028
【全文链接】