近年来,“人造肌肉”在软体机器人领域受到了极大的关注。
有的小伙伴可能还不知道这是什么黑科技。
其实,“人造肌肉”可以作为软体机器人的驱动材料,它的性能主要取决于所使用的智能材料。
介电弹性体致动器(Dielectric elastomer actuator,以下简称 DEA)作为可用于软体机器人的“肌肉”制作材料,能够基于电场驱动直接把电能转化成机械能。
相比较驱动刚性机器人的压电双晶片和电磁电机等刚性执行器,传统的软执行器已经表现出类似肌肉的特性(高能量密度、鲁棒性等),市面上大部分 DEA 的功率密度和寿命都较低,很难在高频(>100 Hz)下运行。
为此,来自麻省理工学院(MIT)的研究团队研发了一款“基于并联多层电极材料技术,具有低驱动电压、强耐久性”的新型 DEA,不仅能够提升微型飞行器的动力,而且使其各方面表现都优于当前同尺度下的其它飞行器。
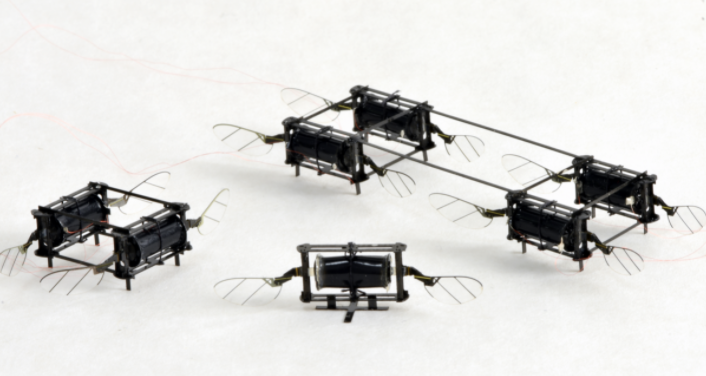
研发团队将软蝇的净升力再提高了80%,并将机器人悬停电压从2000 V降低到500 V。这为在软动力机器人中追求动力自主飞行开辟了令人兴奋的机会。

该项论文以《一种由低压长寿命 DEA 驱动的高升程微型空中机器人》(A High-Lift Micro-Aerial-Robot Powered by Low-Voltage and Long-Endurance Dielectric Elastomer Actuators)作为封面文章发表在 Advanced Materials 上。

让我们来看看麻省理工学院新闻办公室制作的关于该项研究的视频~
据悉,集成该 DEA 的空中机器人在现有亚克级(sub-gram)空中机器人中性能最好、飞行时间最长,其悬停时间达到 20s,位置和姿态误差分别小于 2.5cm 和 2°,并实现了超过 200 万次驱动循环的长使用寿命。

而且,该机器人在升力重量比(lift-to-weight ratio)方面也有所提升,从之前的 2:1 提升到了 3.7:1,是目前同尺寸下能达到的最好性能。这是第一个仅由软执行器驱动的重于空气的空中机器人。除了演示受控飞行之外,该机器人还可以感知并在飞行中的碰撞中幸存下来。
该项研究的突破,可以归功于研发团队进一步降低了 DEA 每一层弹性聚合物(Elastomer) 的厚度。
研究人员表示,从材料角度出发,降低电压就是要在减小每层弹性聚合物厚度的同时,增加相应的层数。
虽然想法听起来很容易,但是具体实践却困难重重。比如,层数增加会使得烘烤聚合物的时间增长,驱动器的整体制作时间也成倍增长,不利于进一步减小厚度;而且,随着厚度的减小,弹性聚合物中的气泡很容易在通电测试的过程中被击穿,从而导致驱动器整体性能的下降。

针对以上这些问题,该团队进行了反复的测试,比如在每层弹性聚合物旋涂后立即抽真空来大幅减少气泡,以及多次放入烤箱等具体加工工艺细节。最终在不断的探索的过程中,找到了更加稳定的解决方法。
随后,他们还进行了各种对比测试,如静态扇翅测试、动态升力测试和最后的飞行器起飞测试等。通过这些测试,研究人员获得了完整的数据,证明其最新加工工艺的确提高了 DEA 和微型飞行器的整体性能。

不过,目前研发的 DEA 还停留在实验室阶段,未来进入世纪应用应该还有一段距离。不过可以肯定得是,这对于开发用于环境探索和操纵等多种应用的下一代软机器人非常重要。
文章内容来源:mit.edu、Deeptech、Advanced Materials
麻省理工新型“人造肌肉”材料,未来或可驱动微型飞行器用于救援搜索-机器人大讲堂
