你是否想象过拥有《死亡搁浅》游戏里配备的外骨骼来大幅提升自己的力量?

游戏《死亡搁浅》中的外骨骼
亦或是拥有电影《明日边缘》里类似的战斗外骨骼与外星人厮杀?

电影《明日边缘》中的外骨骼
当然游戏与电影里的科幻元素与我们相距太过遥远,里面的很多设想是我们对科技的期盼。但是最近南方科技大学推出的一款半人马式辅助搬运载物行走系统,使我们离电影和游戏中的设想更近了一步。

图1 使用者穿戴半人马负载系统照片
这款新颖的可穿戴式设备由2条细长的刚性机器腿组成,每条机器腿拥有2个主动自由度并由2个电机负责驱动,整套设备的重量为14.5kg,穿戴这款半人马负载装备的人在进行重物负载时,可以减少70%的负载压力。该项研究以A Centaur System for Assisting Human Walking with Load Carriage为题,在2022年10月23-27日京都举行的 IEEE/RSJ 智能机器人和系统国际会议 ( IROS ) 中展示了相关研究成果。
▍为什么要设计为半人马负载结构?
当前的负载外骨骼大多作为单兵装备来提升人类的负载能力。如美国伯克利大学设计的 BLEEX、日本筑波大学研发的 HAL-5,都是在人体原有的关节与肢体处进行外部辅助与提升,但无法避免机械系统与人类肢体之间的干涉,这会扰乱穿戴者腿部的自然运动,甚至对穿戴者造成肢体伤害。
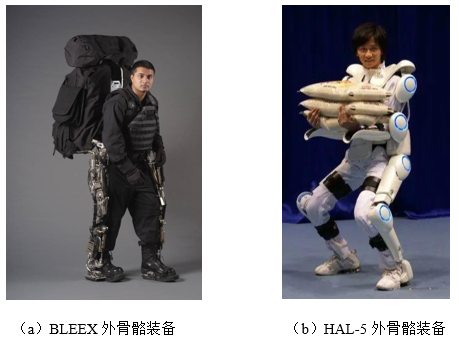
图2 现有的外骨骼装备
而这种新型半人马负载结构的主要支撑点位于人体后侧,安全的腿部旋转半径保证了机器腿不会干扰穿戴者的正常行走。在穿戴者后背还设计有1个背板,为整个系统提供更大的支撑面,同时减轻穿戴者腰部的负担。2条机器腿的交叉抬起使得任何时候至少有1个半人马腿部有效接触地面,保证了穿戴者时刻拥有额外的支点用于分担负载压力。
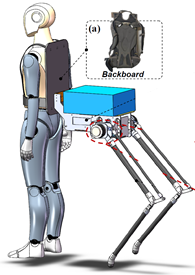
图3 半人马负载系统机械机构图
▍半人马负载机构智能化设计
作为一套具有科幻色彩的外骨骼负载系统,这款新型半人马负载机构的设计具有很多智能化元素。图4为半人马负载机构机身上的智能装备系统。首先是在与背板的连接处装配有1个六轴力/扭矩传感器,用于测量人和机器人系统之间的相互作用力,并为机器腿与人的协调行走任务提供力反馈。半人马系统的“脊柱”内放置有1个惯性测量单元,用于检测半人马负载装置的姿势和俯仰角度,结合测得的姿态与角度,机器人腿可通过调整自身高度来保持穿戴者和半人马负载系统之间的平衡。半人马负载系统的电池和控制器(STM32)也被放置于“脊柱”处用于接收传感器的数据,并计算出能够维持人机系统平衡的机器腿控制轨迹,使其具备与人类合作行走的能力。
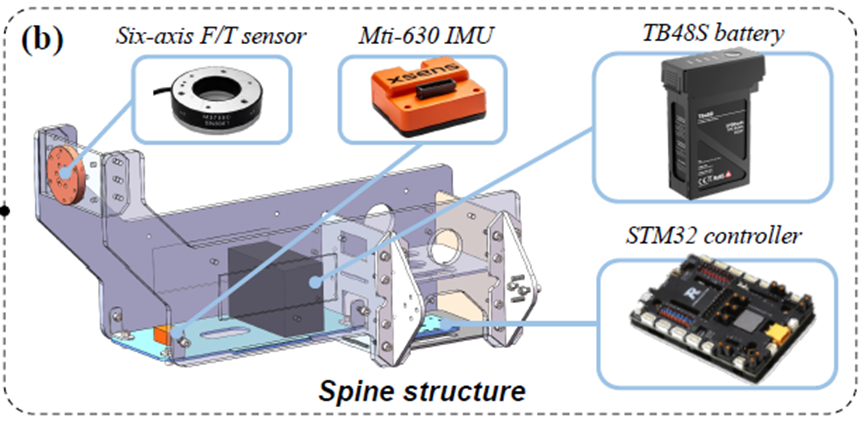
图4 “脊柱”结构内部配置图
▍机器人与人的协同运动如何实现?
半人马负载系统与穿戴者的协同运动主要通过规划机器腿的步态和控制腿的摆动轨迹来实现。
控制系统设计的步态并不是2条机器腿完全交叉抬起,而是设定每条腿处于着地状态和抬起状态的时间比为6:4,保证任一时刻至少有1条腿处于着地状态,使得负载系统能持续为穿戴者提供支撑力。
机器腿在着地状态时的轨迹规划,不仅会对系统产生向上的支撑力,也会在支撑过程中根据穿戴者的行进速度提供一定的向前推力,进一步减轻穿戴者的负载压力。
针对穿戴者的前进速度和步幅在行进过程中不断改变的问题,控制系统装备设有步态纠正算法,可以通过六轴力传感器和惯性测量单元检测到的数据,计算出当前状态下最合适的步幅。在穿戴者改变行进速度时,机器腿也能通过调整自身步长以适应穿戴者的运动状态,达到人机协同运动的效果。
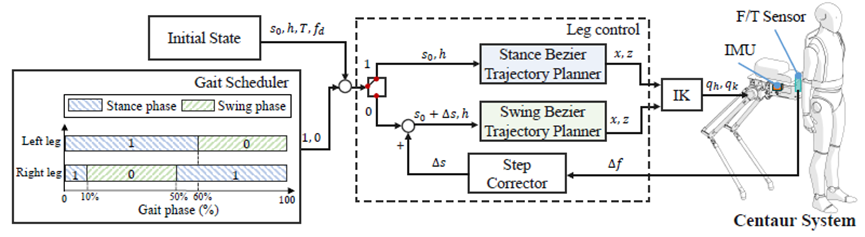
图5 交互式运动控制系统
▍半人马负载系统未来之路
与其他外骨骼设备相比,半人马负载系统在结构和设计思路上具有创新性,为外骨骼设备研究开辟了新发展方向。目前由于足端与地面接触面积有限,机器人行走过程中存在滑倒与倾覆的可能,下一步,研发团队考虑通过改进脚部设计提供更大的足地接触面积,同时改进的足尖还可作为额外的支点为穿戴者提供更大的负载支持。另外,研发团队计划采用更多维的传感器数据,以计算最优的步长人机配合算法。
近年来,各种可穿戴式机械设备不停涌现,很多科技公司和高校也推出了相关产品,并应用到军事、医疗等场景。相信在不远的将来,游戏和电影中的外骨骼设备会真正走出屏幕来到我们的生活中,帮助我们超越人类极限探索更多未知领域。
原文信息:
Ping Yang, Haoyun Yan, Bowen Yang, Jianquan Li, Kailin Li, Yuquan Leng and Chenglong Fu*. A Centaur System for Assisting Human Walking with Load Carriage. 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2022), pp. 5242-5248, Kyoto, Japan, 2022.
下载地址:
https://ieeexplore.ieee.org/document/9981394
作者 | 朱玮良 张国腾
编辑 | 唐 秋 郭萌萌
审核 | 许力琴
