01 专刊介绍
仿生多介质节律性运动
大自然是人类灵感之源,仿生智能与机器人技术改变着我们的日常生活。随着生物、材料、微电子、模式识别和控制理论等技术的发展,仿生机器人正在获得前所未有的移动、感知和协作能力,极大地扩展了它们的应用领域。多介质操作要求机器人能够在各种环境中敏捷移动、自适应感知并广泛学习,执行器、传感器、通信和计算技术的发展,为仿生机器人多介质节律性运动奠定了基础,多介质领域的先驱性研究正在引领一场全新的技术革命。在培育机器人自主创新的进程中,仿生多介质节律性运动相关研究将为工业机器人、服务机器人和特种机器人的应用提供广阔前景。本期专刊旨在探讨仿生启发式机器人控制理论与技术的协同应用,促进多介质节律性运动(如游泳、飞行、爬行、跳跃等)研究的发展。并从多介质运动的机构设计、运动控制与应用三大主题出发选取了7篇论文,以此分享仿生智能和机器人领域的研究现状、挑战以及发展趋势。
02 客座编委

喻俊志
北京大学

文力
北京航空航天大学
03 文章荐读
Editorial for the Special Issue on Biomimetic Multi-domain Rhythmic Motions
Junzhi Yu
原文链接:
https://www.sciencedirect.com/science/article/pii/S2667379722000389
1. A decoupling three-dimensional motion control algorithm for spherical underwater robot
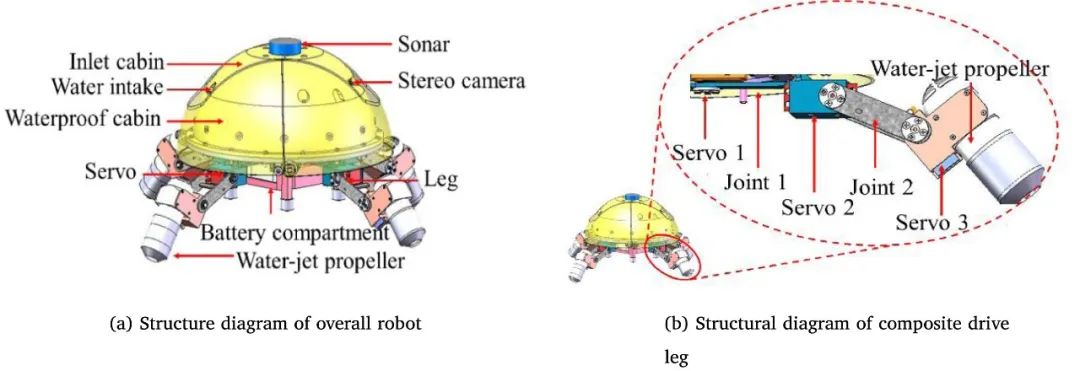
北京理工大学&(日本)香川大学 | 球形水下机器人的解耦三维运动控制算法
Pengxiao Bao, Yao Hua, Liwei Shi, Shuxiang Guo, Zhengyu Li
论文提出了一种基于机器人姿态计算的新型解耦运动控制算法,采用4个模糊 PID 控制器独立控制水下球形机器人的全方位运动,保证机器人在近海、浅水和狭窄地形等环境中灵活运动。
原文链接:
https://www.sciencedirect.com/science/article/pii/S2667379722000274
2. Design, fabrication, and characterization of a hydrostatic electroactive soft actuator for bio-inspired robots
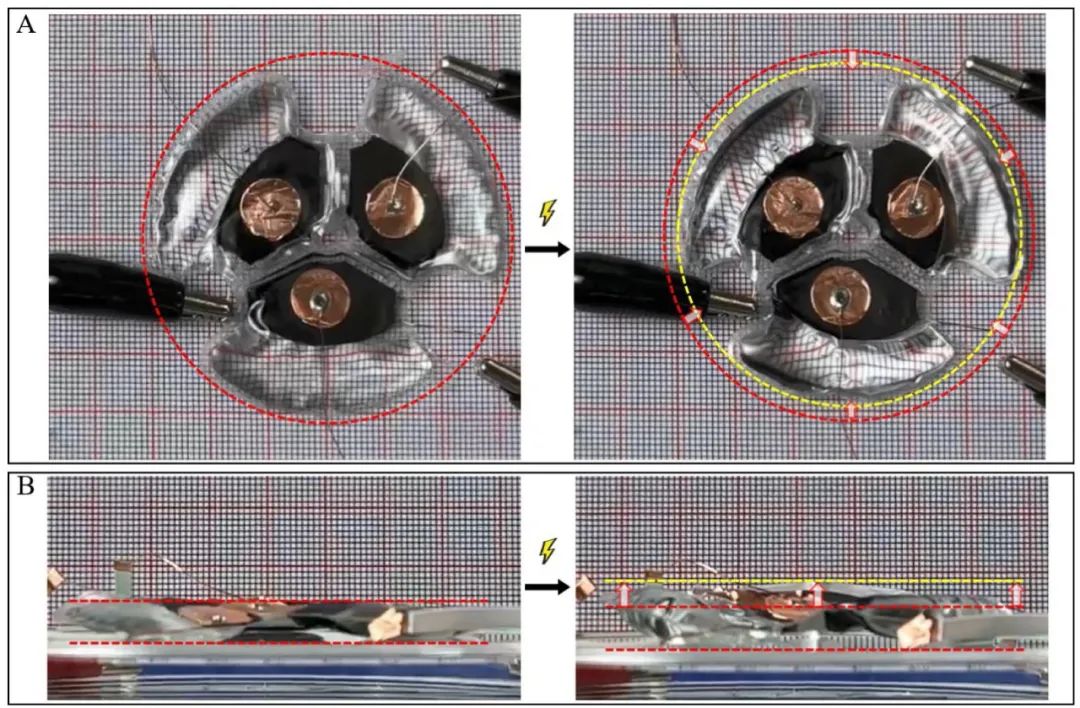
北京航空航天大学 | 一种电驱动静水压仿生软体执行器的设计、制造与特点分析
Yiyuan Zhang, Haonan Zhang, Kuang Wang, Yuchen Liu, Yanru Mo, Li Wen
论文以章鱼臂横向肌肉为灵感,设计了一种电驱动静水压软体执行器。首先,建立优化执行器几何参数的数学模型,分析单通道执行器性能;然后,将三个执行器堆叠,实现轴向伸长、径向收缩和弯曲,覆盖了章鱼臂横向肌肉的所有运动模式。该项研究成果为实现模仿章鱼臂的多模态运动奠定了重要基础。
原文链接:
https://www.sciencedirect.com/science/article/pii/S2667379722000377
3. Design, fabrication, and testing of a maneuverable underwater vehicle with a hybrid propulsor
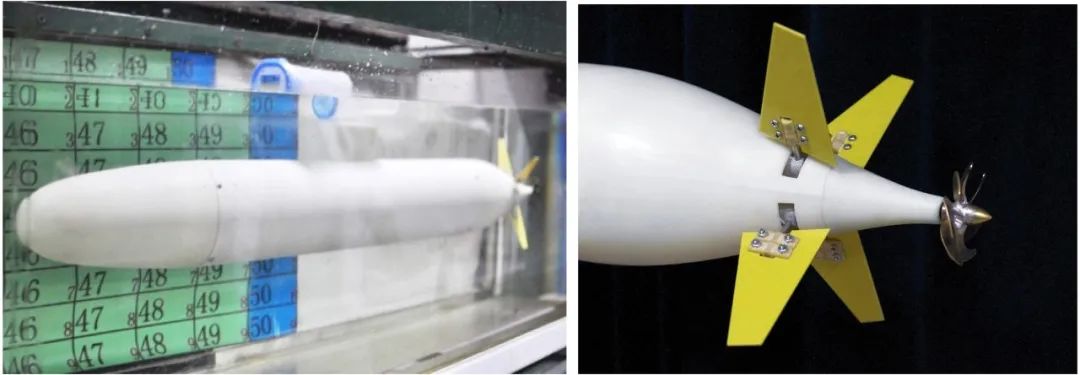
中国科学技术大学&中国船舰研究设计中心 | 一种高机动的组合仿生推进水下航行器的设计、制造和测试
Dongqi Gao, Tong Wang, Fenghua Qin, Shiwu Zhang, Jun Jing, Jiming Yang
论文提出了一种由组合动力推进器驱动的新型无人水下航行器,其推进器包括1个螺旋桨和4个仿生胸鳍,用于保证航行器的机动性和快速性;设计基于中枢信号发生器的运动控制算法,结合反馈控制纠正偏航,实现装备的运动控制。实验表明该航行器适用于多种水下任务场景。
原文链接:
https://www.sciencedirect.com/science/article/pii/S2667379722000328
4. Development and experimental characterization of a robotic butterfly with a mass shifter mechanism
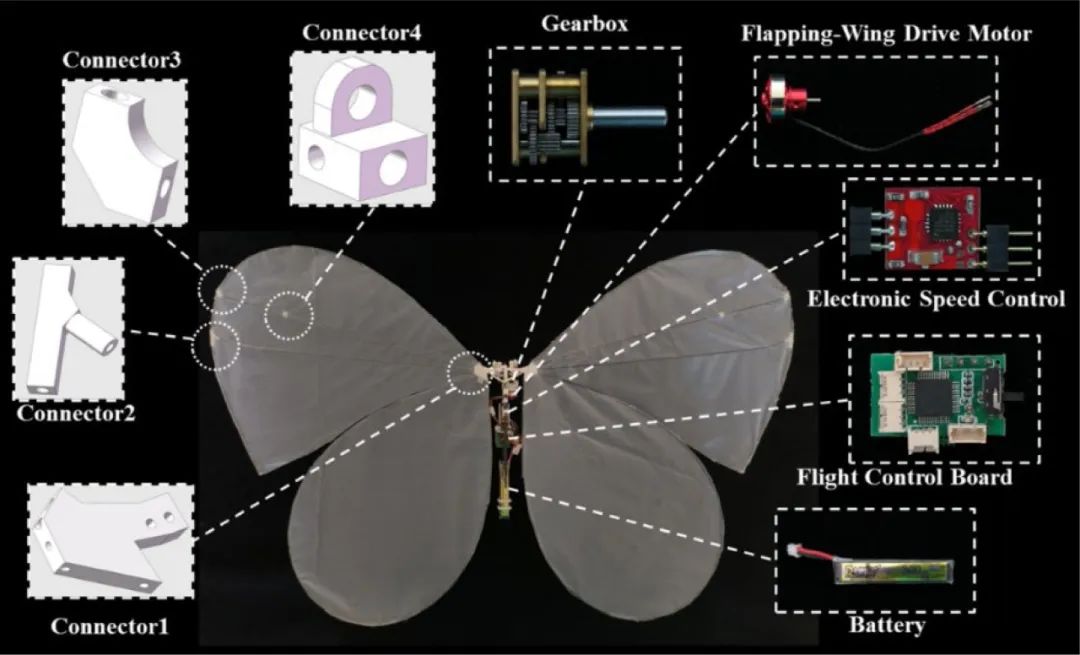
北京科技大学 | 带有质量位移机构的仿蝴蝶扑翼飞行机器人设计与实验表征
Haifeng Huang, Wei He, Ze Chen, Tao Niu, Qiang Fu
论文设计了一款基于质量位移机构转向的仿蝴蝶扑翼飞行机器人 USTButterfly-II,使用平面四杆机构驱动仿蝴蝶扑翼飞行机器人进行扑动,并提出一种新颖的无尾转向控制方法。利用多摄像头动作捕捉机翼的运动和飞行轨迹,为仿蝴蝶扑翼飞行机器人的飞行机制研究提供了数据支持。
原文链接:
https://www.sciencedirect.com/science/article/pii/S2667379722000365
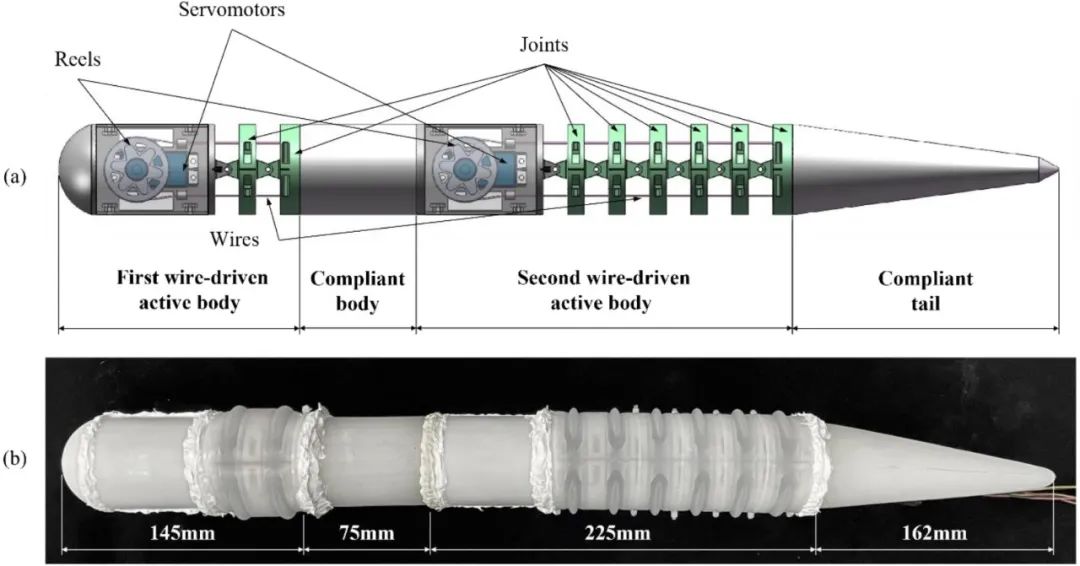
5. Learn to swim: Online motion control of an underactuated robotic eel based on deep reinforcement learning
华南理工大学 | 学习游泳:基于深度强化学习的欠驱动机器鳗鱼在线运动控制
Qixin Wang, Zicun Hong, Yong Zhong
论文提出了一种基于深度强化学习的方法,用于在线学习控制具有多段被动结构的机器鳗鱼。此方法不需要底层控制模型或策略,由神经网络直接在线控制。通过大量实验验证了该控制方法的有效性,揭示了难以建模的仿生机器人智能控制问题。
原文链接:
https://www.sciencedirect.com/science/article/pii/S2667379722000262
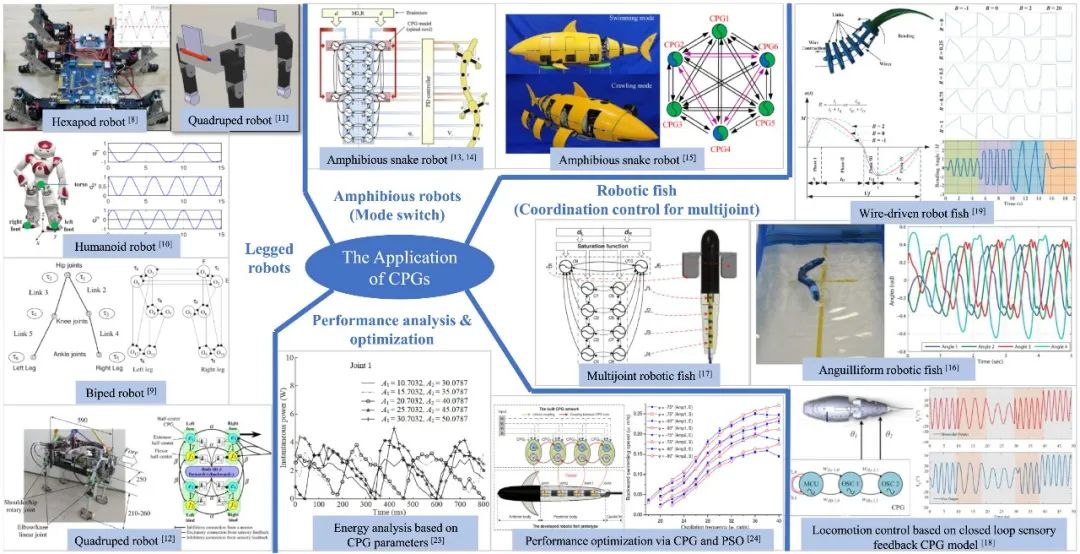
6. NA-CPG: A robust and stable rhythm generator for robot motion control
中国科学院自动化研究所&中国科学院大学&北京大学 | 面向机器人运动控制的归一化非对称中枢模式发生器
Ru Tong, Changlin Qiu, Zhengxing Wu, Jian Wang, Min Tan, Junzhi Yu
论文针对机器人节律性运动控制问题,提出了一种归一化非对称中枢模式发生器(NA-CPG)。基于 Hopf 振荡器和归一化的 CPG,设计约束函数和频率调节机制,并利用强化学习方法在线优化 NA-CPG 网络参数。在自主研发的仿生机器鱼上开展的实验表明,所提的 NA-CPG 能够产生稳定、精准的节律控制信号,可广泛应用于机器人运动控制领域。
原文链接:
https://www.sciencedirect.com/science/article/pii/S2667379722000353
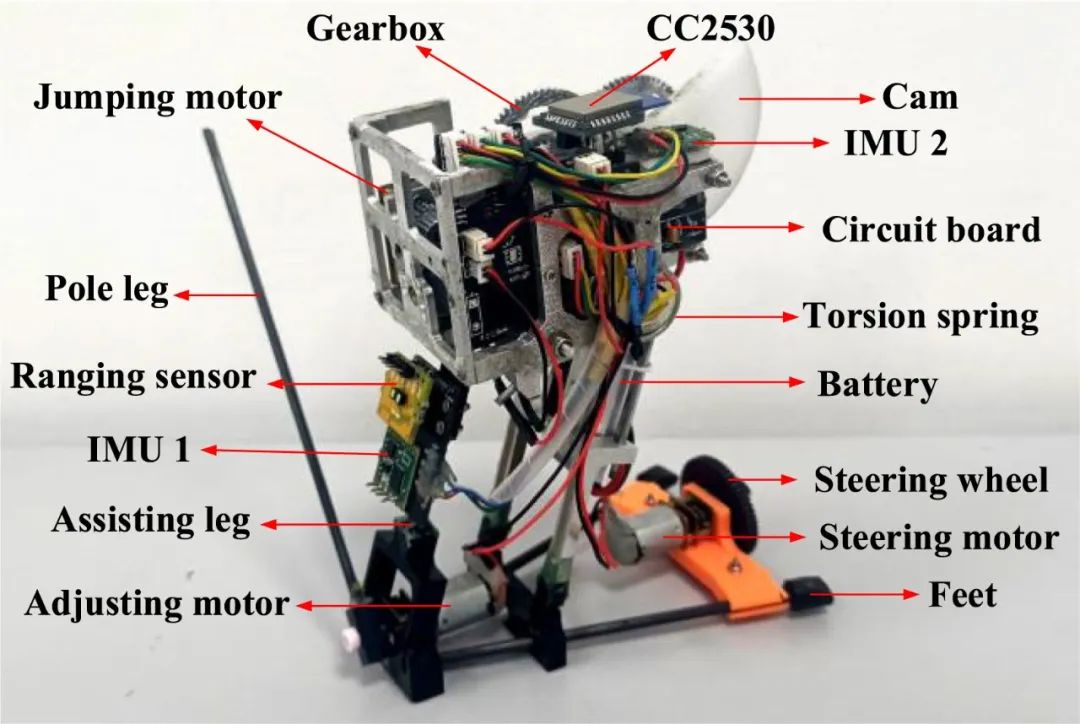
7. Obstacle detection modelling, and autonomous stair climbing of a miniature jumping robot
东南大学 | 微型跳跃机器人的障碍检测建模和自主爬梯
Yaning Zhang, Jun Zhang, Bohuai Chen, Haoyun Chen, Auiguo Song
论文结合微型跳跃机器人(MJR)的姿态和距离检测,分别提出了一种新的障碍检测方法和基于高度、宽度测量的自动爬梯算法。在实际机器人系统上开展的实验表明,该算法能有效提升 MJR 在多障碍环境中的检测、自主爬梯等运动性能。
原文链接:
https://www.sciencedirect.com/science/article/pii/S2667379722000456
本刊信息
Biomimetic Intelligence and Robotics (BIROB, ISSN 2667-3797, CN 37-1527/TP)聚焦仿生智能与机器人领域,主要发表高质量原创理论和应用研究成果,涉及领域包括但不限于:仿生设计、仿生材料、仿生驱动与感知、工业机器人、服务机器人、特种机器人、医疗机器人、微型和纳米机器人、软体机器人、外骨骼系统、机器学习、人机交互、运动学和动力学、运动规划与控制、自主系统、多机器人系统等。期刊接收包括原创研究论文、综述、短篇通讯等多种类型的文章,目前对作者和读者均免费,平均审稿周期30天,诚邀广大学者将高质量的创新成果投稿至本刊。期刊将为仿生智能和机器人领域最具创新性的新发现和最具影响力的应用提供国际交流平台,以促进机器人学、仿生学和人工智能领域的进步和原创性贡献。

期刊官网:
https://www.journals.elsevier.com/biomimetic-intelligence-and-robotics
期刊联系方式:
bir@sdu.edu.cn
投稿网址:
https://www.editorialmanager.com/birob/default1.aspx
编辑 | 唐秋 郭萌萌
审核 | 许力琴 张国腾 张勤
