
视频赏析:
内容摘要
中枢模式发生器(Central Pattern Generator,CPG)能够自激生成平滑的周期性节律信号,被广泛应用于机器人运动控制。现有的 CPG 网络主要存在以下3个问题:参数剧烈变化会导致系统出现不可逆的发散;模型仅在限定参数范围内保持良好的收敛性;复杂拓扑结构中的耦合关系会影响输出幅值精度。为此,本文提出了一种基于 Hopf 振荡器的归一化非对称CPG(Normalized Asymmetric CPG,NA-CPG),通过归一化其幅值参数,增加约束函数和频率调节机制,实现模型参数解耦、精准幅值输出、稳定快速收敛以及非对称节律波形生成,有效避免了参数大幅度变化引起的网络振荡或发散现象。为提高机器人运动性能,本文还提出了一种基于强化学习的 NA-CPG 网络参数在线优化方法,并在自主研发的仿生机器鱼上完成了实验验证。结果表明,本文提出的 NA-CPG 模型能够产生稳定、精准的节律控制信号,模型参数经优化处理后,仿生机器鱼的游动速度提高6.7%,头部摆动减小41.7%,游动性能显著提升。
图文导读
(一)近年来,中枢模式发生器已广泛应用于腿足式机器人、水陆两栖机器人、水下游动机器人等领域。很多 CPG 模型基于非线性振荡器构建,其中基于 Hopf 振荡器的CPG(Hopf CPG)得益于稳定的极限环,能够在合适的学习率下快速收敛。但是,现有 Hopf CPG 存在以下不足:
(1)Hopf CPG 仅能生成对称的节律信号,输出节律单一,无法满足自然界普遍存在的非对称运动的控制需求,限制了运动模式的多样性。
(2)在 CPG 模型中,当学习率α和振幅都较大时,输出节律可能强烈振荡,见图2(a);反之,输出节律则可能缓慢收敛,见图2(b)。
(3)当 CPG 参数(频率或幅度)急剧变化时,Hopf 振荡器为了快速收敛可能产生较大的振荡器变化率,会导致机器人关节角拍动节律出现尖峰甚至发散现象,如图2(c)、(d)所示。
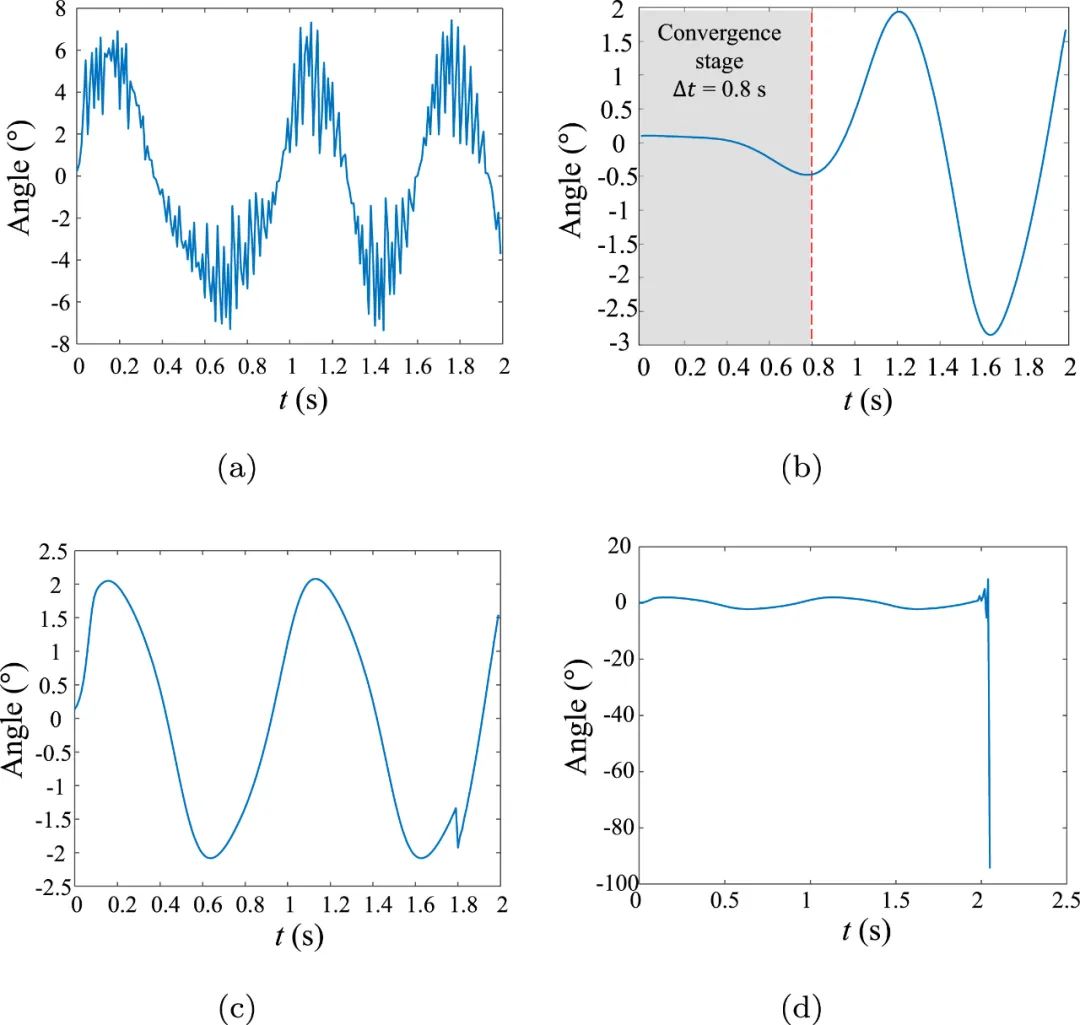
图2 经典Hopf CPG的不稳定节律输出.(a)输出振荡;(b)收敛缓慢;(c)尖峰;(d)发散
(二)本文提出了一种归一化非对称 CPG 模型,通过2个策略来提升节律输出信号的稳定性和多样性:(1)将振荡器幅值归一化,并增加约束函数以提高 CPG 的稳定性和精度;(2)利用不对称参数调整不同位置极限环的循环速度,产生不对称信号。为了提升模型普适性,给出了 NA-CPG 的全连接数学模型,并构建其矩阵形式,以提高数值计算的运算效率。还提出了一种 NA-CPG 参数在线优化方法,并部署于多关节仿生机器鱼平台进行实验验证。
(三)图6是机器鱼任务训练框图。该任务以提升机器鱼的游速为目标,通过分析仿鱼游水动力,构建机器鱼的动力学模型和仿真环境;基于强化学习优化算法获得 NA-CPG 模型的关键参数,输入模型生成机器鱼的关节控制信号,并结合动力学模型计算其游动速度;最后根据其游速评价所生成参数的优劣,并进行迭代优化。
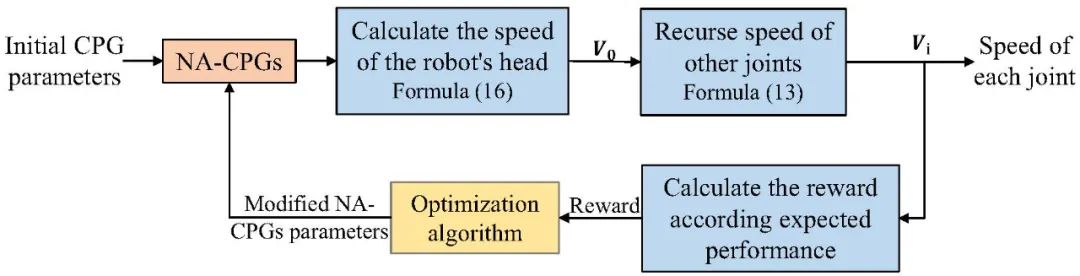
图6 机器鱼任务训练框图
(四)仿真实验证明 NA-CPG 输出信号具有多样性和稳定性,主要体现在以下3个方面:(1)NA-CPG 在不对称参数作用下能够生成非对称振荡模式信号,见图7(a);(2)NA-CPG 具有较好的幅值准确性,在学习率α=30 的情况下,幅值误差仅为5.3%,见图7(b)。不同参数下实验的统计结果表明,幅度误差均值为4.85%(±3.14%);(3)NA-CPG 在参数发生显著变化时仍能平滑过渡,见图7(c)。
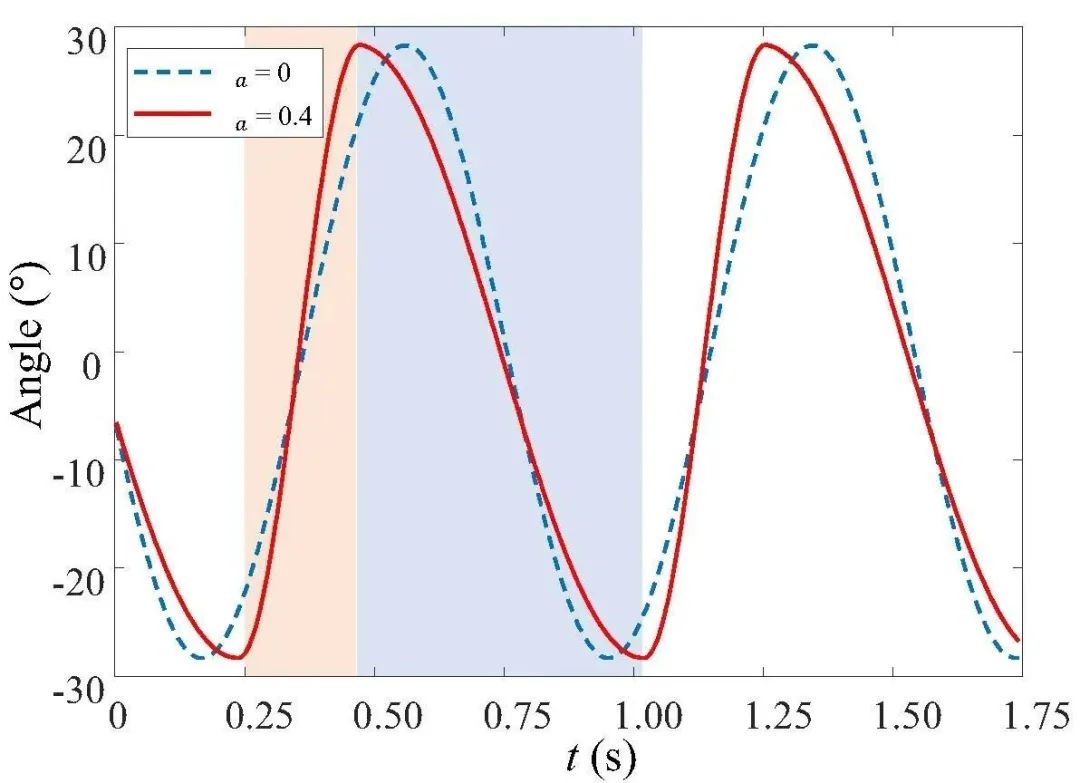
(a)非对称输出特性
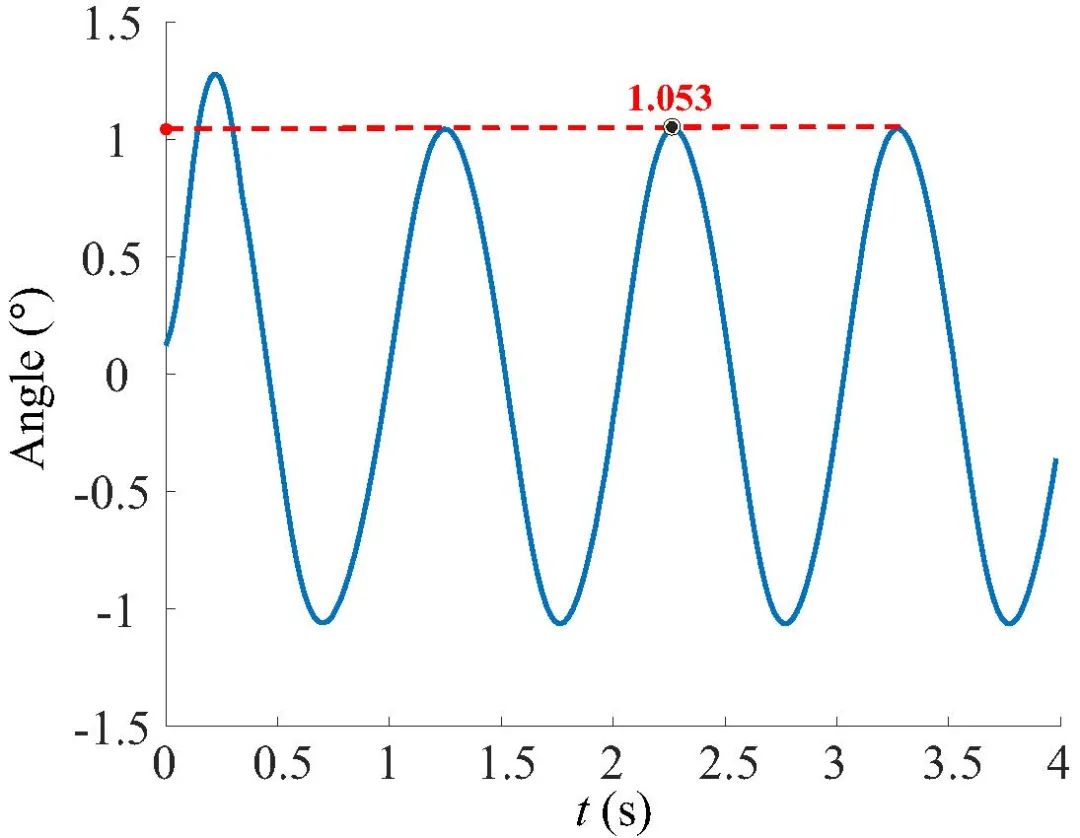
(b)精准节律输出
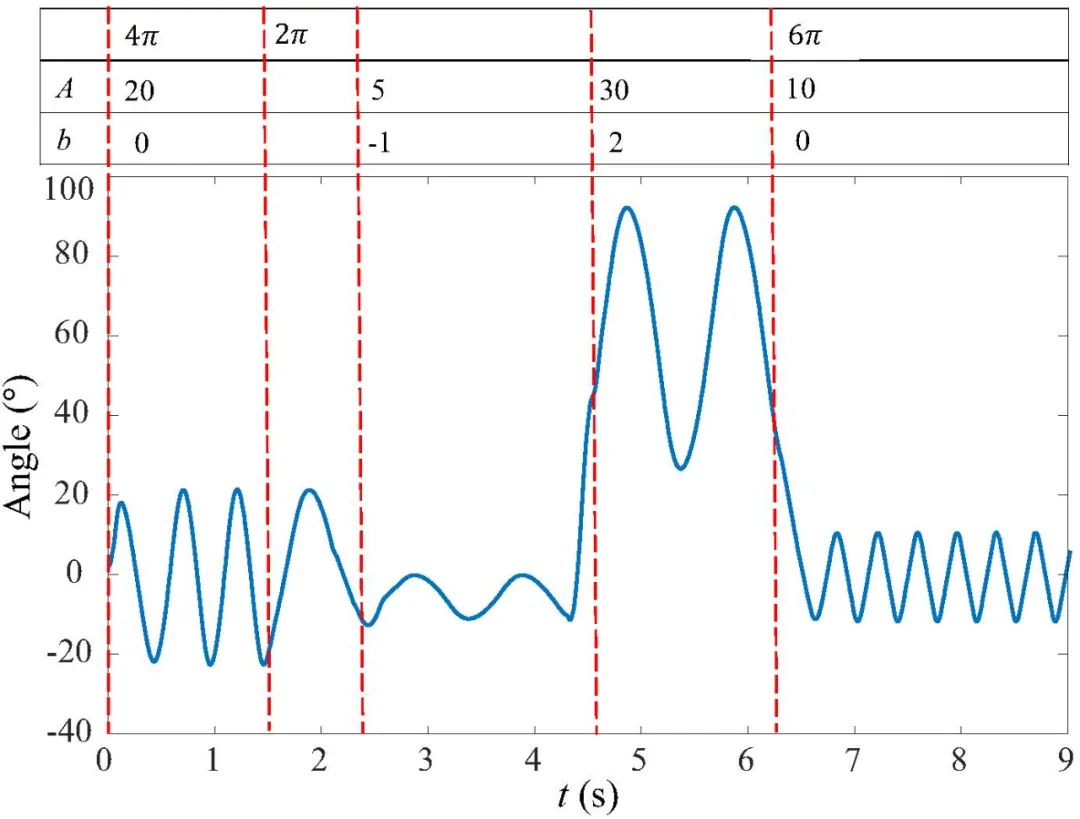
(c)参数变化下的平滑输出
图7 NA-CPG的输出特性
在NA-CPG 参数优化方面,所提优化算法在训练60次后收敛,训练曲线如图9(a)所示。NA-CPG 模式参数经优化处理后,仿生机器鱼的前向游动速度提升6.7%,头部摆动幅度降低41.7%,游动性能显著提升。
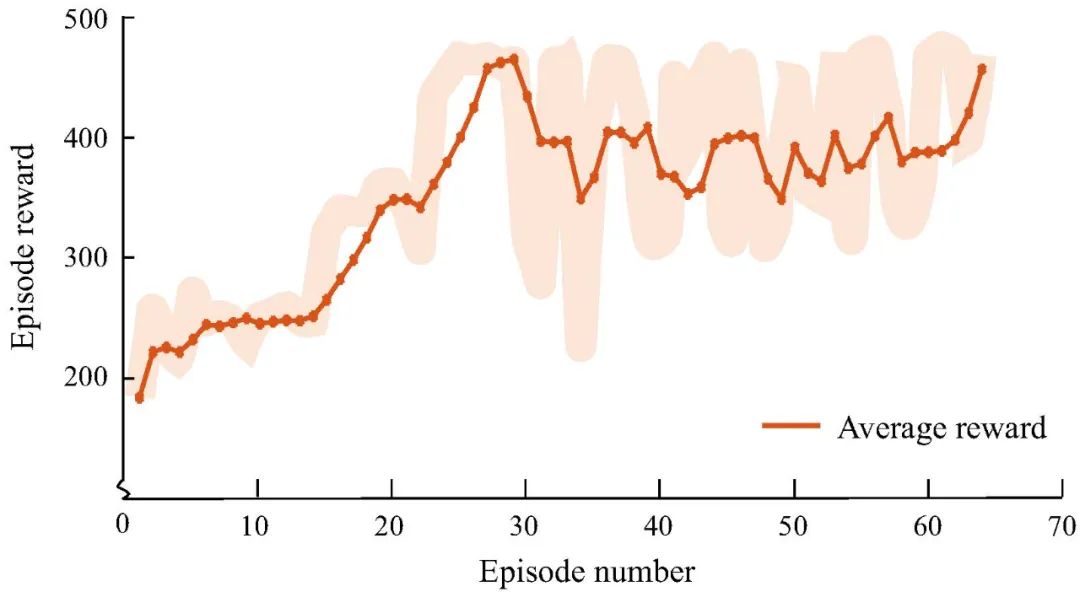
(a)训练收敛曲线图
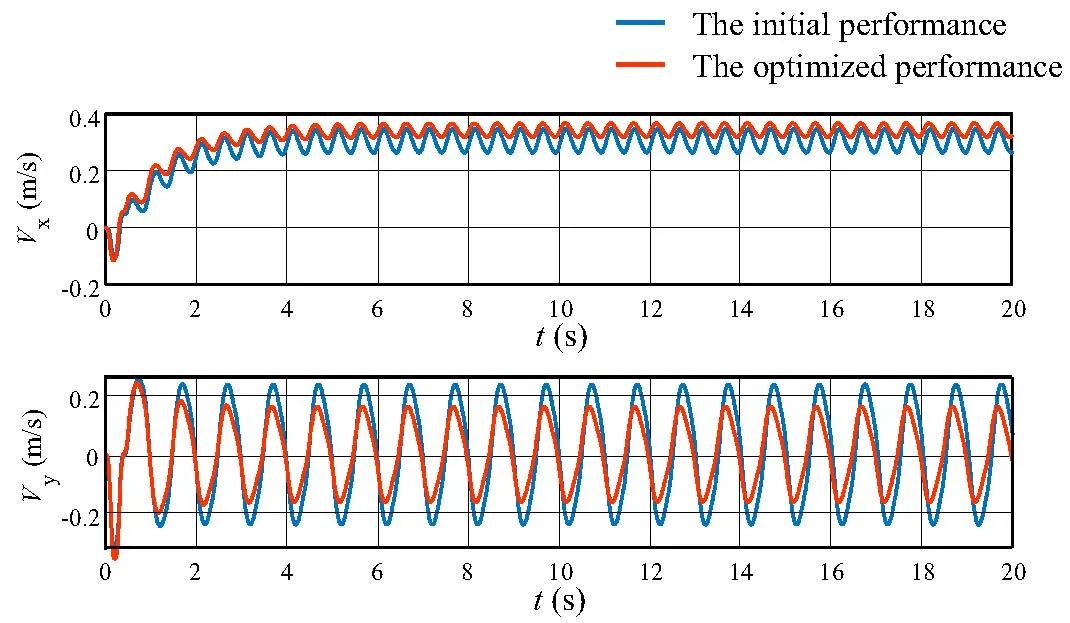
(b)训练前后机器鱼游动性能对比
图9 在线优化方法的测试结果
【作者信息】
Ru Tong1,2,Changlin Qiu1,2,Zhengxing Wu1,2,*,Jian Wang1,2,Min Tan1,2, Junzhi Yu1,3
1 State Key Laboratory of Management and Control for Complex Systems, Institute of Automation, Chinese Academy of Sciences, Beijing 100190, China
2 School of Artificial Intelligence, University of Chinese Academy of Sciences, Beijing 100049, China3 Department of Advanced Manufacturing and Robotics, College of Engineering, Peking University, Beijing 100871, China* Author to whom correspondence should be addressed: zhengxing.wu@ia.ac.cn
【DOI】
https://doi.org/10.1016/j.birob.2022.100075
【全文链接】
期刊信息
Biomimetic Intelligence and Robotics (BIROB, ISSN 2667-3797, CN 37-1527/TP)聚焦仿生智能与机器人领域,主要发表高质量原创理论和应用研究成果,涉及领域包括但不限于:仿生设计、仿生材料、仿生驱动与感知、工业机器人、服务机器人、特种机器人、医疗机器人、微型和纳米机器人、软体机器人、外骨骼系统、机器学习、人机交互、运动学和动力学、运动规划与控制、自主系统、多机器人系统等。期刊接收包括原创研究论文、综述、短篇通讯等多种类型的文章,目前对作者和读者均免费,平均审稿周期30天,诚邀广大学者将高质量的创新成果投稿至本刊。期刊将为仿生智能和机器人领域最具创新性的新发现和最具影响力的应用提供国际交流平台,以促进机器人学、仿生学和人工智能领域的进步和原创性贡献。

期刊官网:
https://www.journals.elsevier.com/biomimetic-intelligence-and-robotics
期刊联系方式:
bir@sdu.edu.cn
投稿网址:
https://www.editorialmanager.com/birob/default1.aspx
