视频赏析
内容摘要
本文以章鱼臂横向肌肉为灵感,设计了一种电驱动静水压软体执行器(HESA),介绍了激光加工技术在 HESA 制造中的优势,并讨论了激光加工对执行器外膜的影响。建立单通道执行器的数学模型,结合模型仿真和实验优化执行器几何参数,执行器单片轴向应变可达32.2%,半径方向应变为7.8%。另外,通过将3个执行器堆叠,实现轴向伸长、径向收缩和弯曲,覆盖了章鱼臂横向肌肉的所有运动模式。本研究可能为实现模仿章鱼臂横向肌肉的仿生软体执行器奠定基础,这在仿章鱼臂肌肉的相关研究中较少涉及但至关重要。
图文导读
(一)本文通过研究章鱼臂横向肌肉的驱动方式,设计了一种能够模仿其运动模式的执行器。本文介绍了执行器的基本运动方式,驱动横向肌肉组织在恒定体积的约束下运动,通过驱动横向肌肉组织的部分或整体,实现整体肌肉组织的径向收缩、轴向伸长与弯曲(图1A)。根据横向肌肉组织的特点,设计了一种三通道电驱动静水压软体执行器,本体中不可压缩的介电流体,使其满足横向肌肉体积恒定的约束条件,该执行器能覆盖章鱼臂横向肌肉的所有运动模式(图1B)。
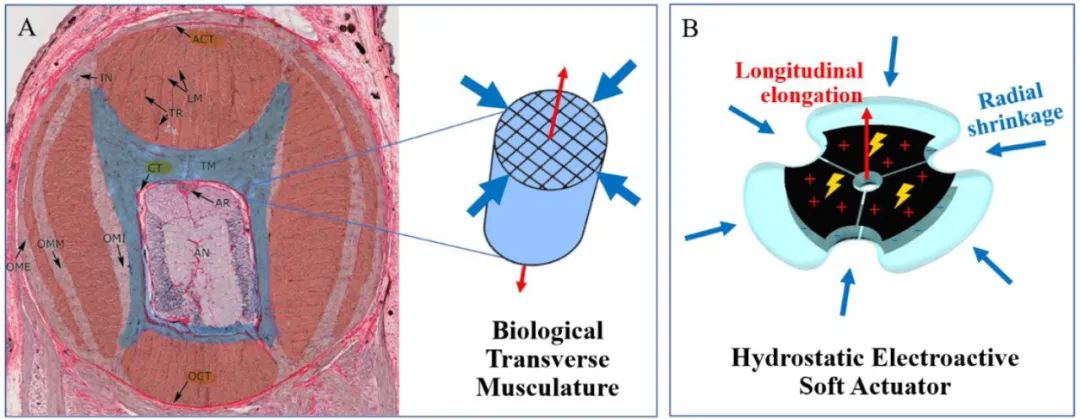
图1 一种灵感来自静水压骨骼肌横向肌肉组织的电驱动软执行器
(二)初始化执行器尺寸后,通过改变扇形轮廓的开口角度和电极半径进行参数优化实验。考虑到激光加工的高精度,以毫米为单位调整几何参数。实验发现,开口角会改变执行器单元的油液分布。开口角越大,油液分布越均匀,最远和最近电极板之间的距离间隙越小,执行器更有可能产生“拉链”效应,执行性能更好。
在不同驱动电压下,以电极半径为自变量,轴向伸长为因变量,3种曲线均呈现先升高后降低的趋势,当电极半径为20mm时,其伸长率达到最大值,如图2B所示。因此,20mm可能接近 HESA 应变性能的拐点。在不同电极半径下,随着驱动电压的增加,执行器在轴向伸长率上没有显著变化(图2C),故在满足启动阈值的前提下,小电压是更好的选择。在不同电压驱动下,开口角为90°和110°的执行器纵向伸长率基本没有差别,而其他开口角度的执行器轴向伸长率随着驱动电压的增大而增大(图2D)。
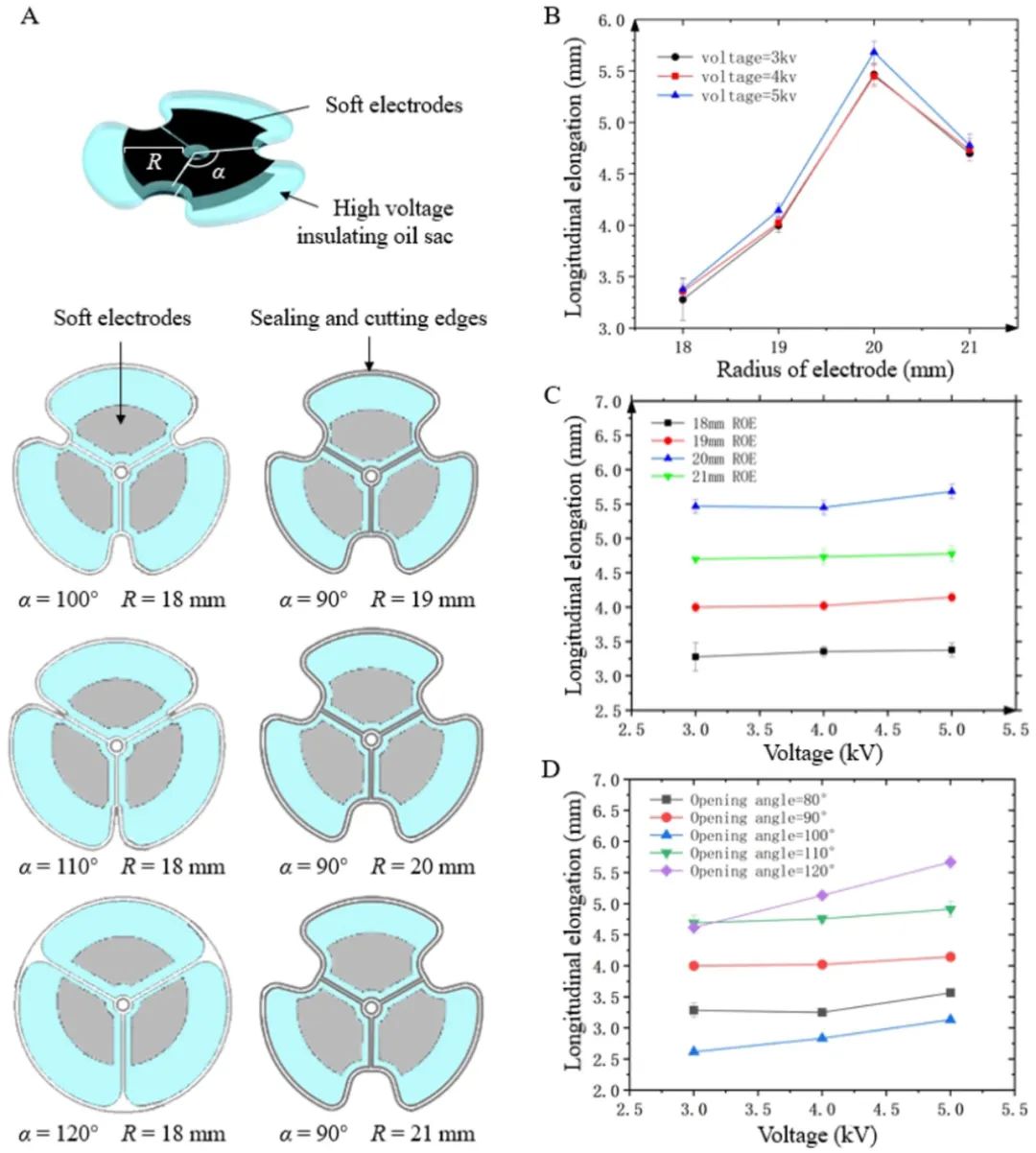
图2 不同参数下 HESA 的延伸性能
(三)为了批量、标准化生产 HESA 执行器,本文使用激光切割机进行加工,如图3所示。激光切割使用高能激光束脉冲迅速加热材料,用于制作 HESA 外膜的 TPU 薄膜材料是一种热塑性材料,高温下熔化再冷却后的效果与焊接相似。通过对不同的加工轨迹设置不同的激光功率,激光切割机可以同时热封(低功率)和切割(高功率)执行器外膜。
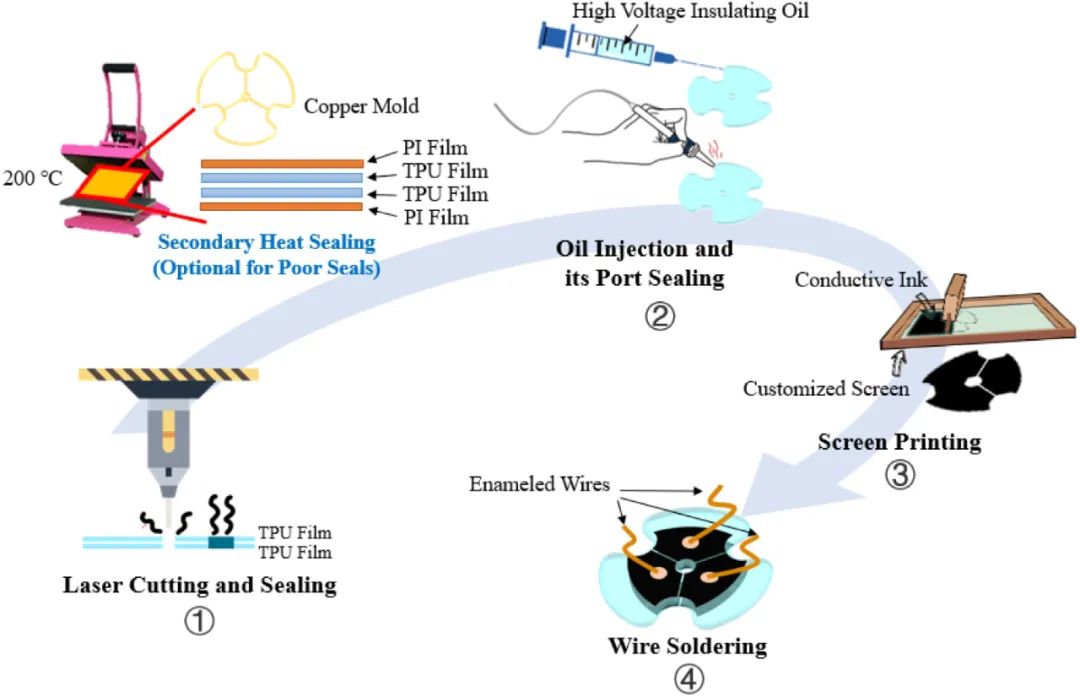
图3 基于激光加工的 HESA 制造工艺
利用激光产生的热量焊接膜材料具有以下优点:1)焊缝轨迹较窄,具有良好的精加工潜力(焦点情况下焊缝轨迹尺寸约为0.2mm);2)膜材在焊接过程中不会受到接触力,不会因残余应力变形;3)可设置各种加工参数和加工路径,一次运行即可完成执行机构的热封和切割;4)激光束机动性好,可实现无惯性紧急制动和快速转向。使用激光加工可能产生焊接失效(图4A)、气泡(图4B)、焊缝有杂质(图4C)与烧穿(图4D)等加工缺陷。
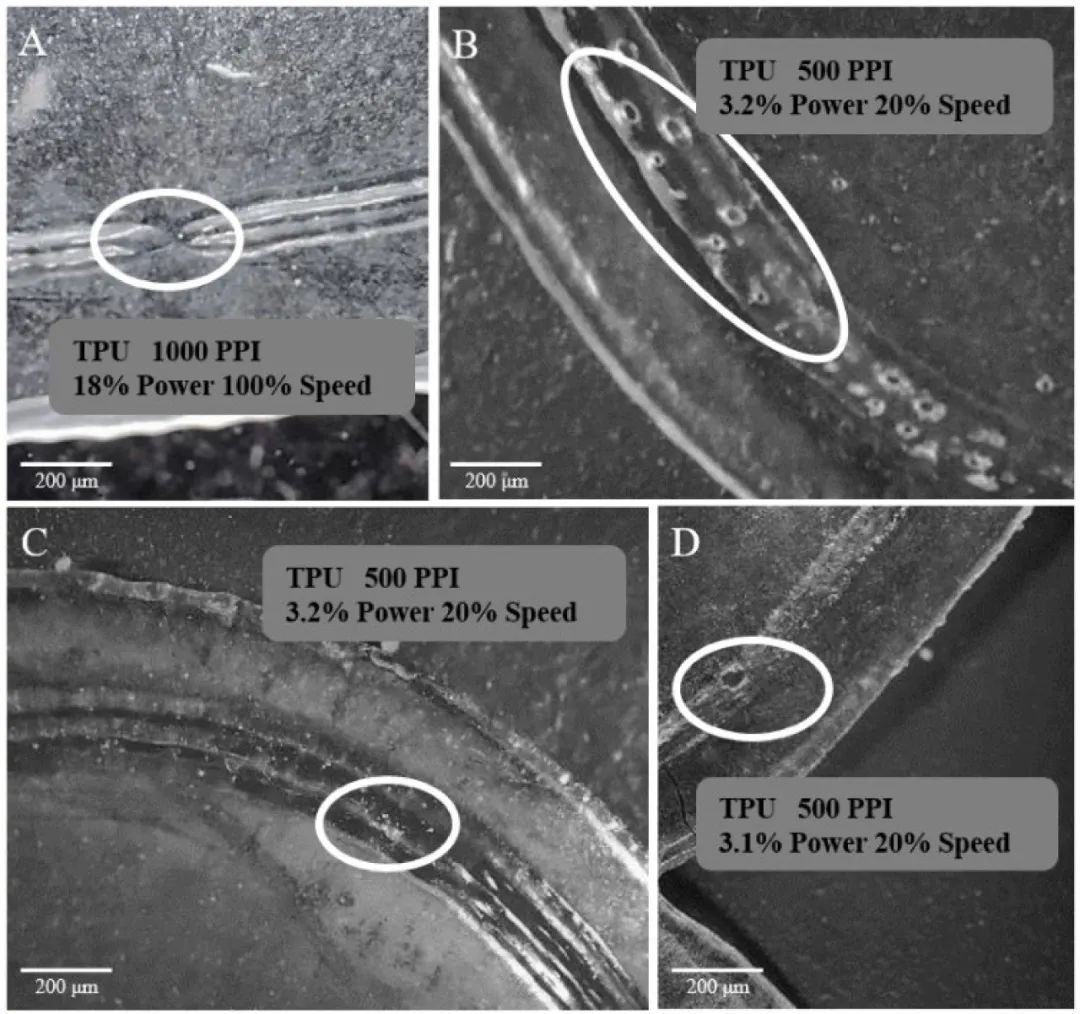
图4 不同参数下的加工缺陷
(四)为了系统可靠地预测执行器性能,本文根据执行器的实验结果和其形状变化的抽象描述,建立了执行器几何物理模型的轮廓,如图5A、5B所示。理想情况下,假设油不可压缩,薄膜在初始状态下不变形,即薄膜与油之间不存在压力,初始压力 Pin = 0。施加高电压后,电极板在静电压力下相互吸引,油被挤压到薄膜外面,薄膜受到挤压而变形,内部压力增大。随着电极板继续受到静电压力的作用,电极距离减小,内部压力增大,直到达到动态平衡。通过上述模型可得,执行器伸长率随电极半径的增大而增大,伸长率在22.5mm半径附近达到峰值,与实际实验中20mm的数值吻合,如图5C所示。当电压大于15kV时,随着电压的增加,纵向伸长率的增长速度明显下降,与上述饱和电压理论一致,如图5D所示。当电极间距大于10kV时,减小电极间距难度增加,如图5E所示。因此,在今后的设计中,应从能量转换效率的角度出发选择合适的驱动电压。
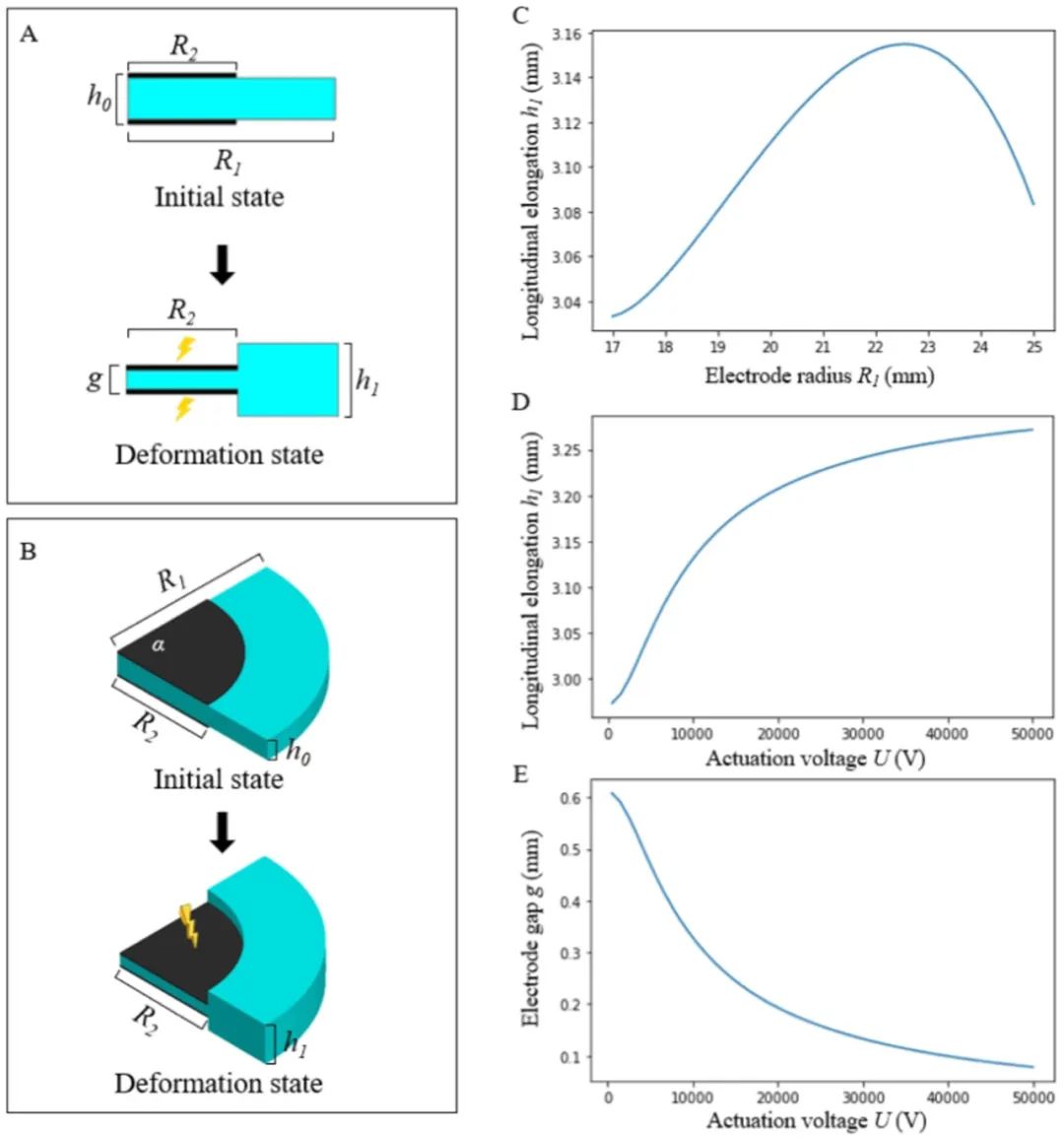
图5 HESA 的单通道建模
(五)采用栅格板测量驱动器的变形(图7)。单个软驱动器在5V电压的驱动下,可以同时实现径向收缩和轴向伸长。半径方向应变可达7.8%,轴方向应变可达32.2%。
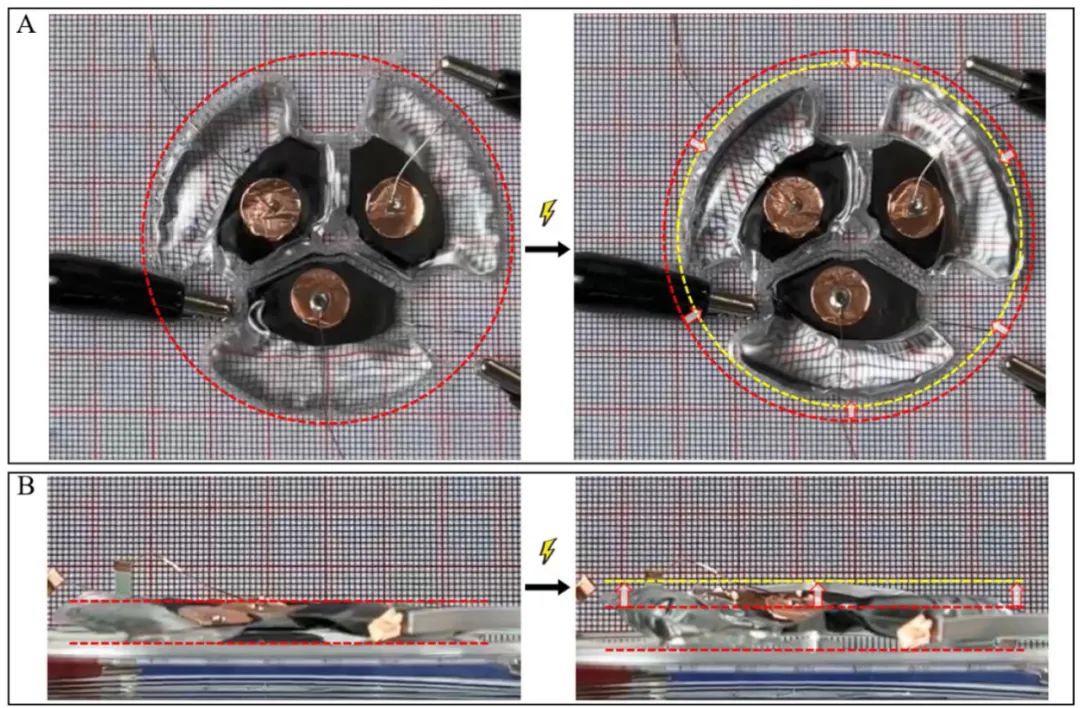
图7 单片 HESA 运动效果
受章鱼横向肌肉组织结构的启发,本文将3个执行器堆叠,所有通道采用5kV电压并联连接。通电时,每个通道中的3对柔性电极相互吸引,迫使介电油进入3个腔体,整个执行器伸长,如图8A所示。在1Hz、5Hz和10Hz不同驱动频率下,得到伸长长度随时间变化的曲线如图8B、8C和8D所示。总体而言,执行器伸长率随驱动频率的增加而减小,在5Hz驱动时,伸长范围略有变化(图8C)。
通过驱动3个执行器中的2个来测试仿生章鱼横向肌肉组织的弯曲能力。当被驱动的2个腔体扩张,未被驱动的腔体形状保持不变时,执行器产生弯曲运动(图8E)。在1Hz、5Hz、10Hz的驱动频率下,取得的实验结果如图8F、8G、8H所示,可以观察到执行器工作相当稳定。
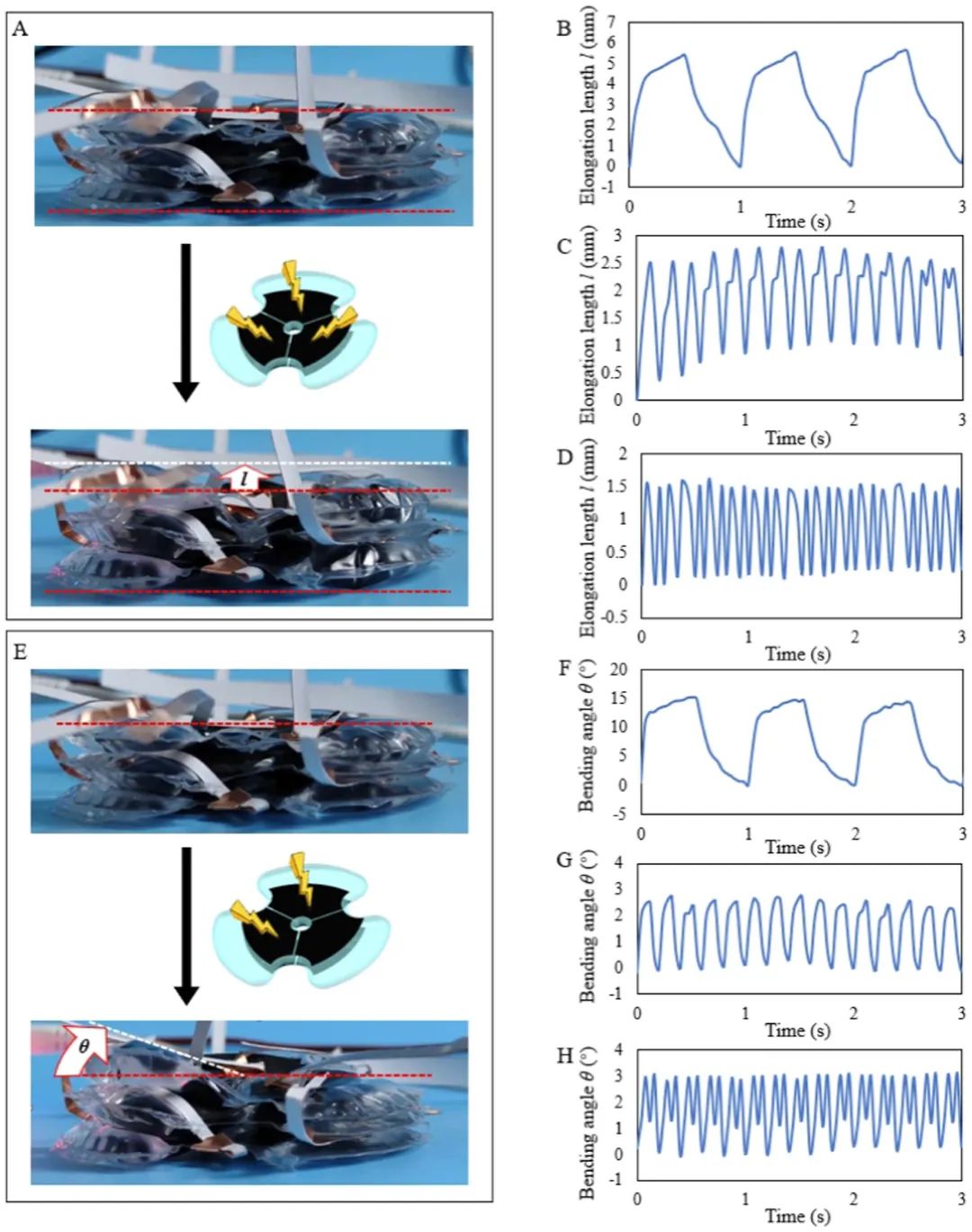
图8 5kV驱动下的 HESA 执行器簇
【作者信息】
Yiyuan Zhang1,a,Haonan Zhang1,a,Kuang Wang1,Yuchen Liu1,Yanru Mao1, Li Wen2,*,b
1 School of General Engineering, Beihang University, Beijing 100191, China
2 School of Mechanical Engineering and Automation, Beihang University, Beijing 100191, China
* Author to whom correspondence should be addressed: liwen@buaa.edu.cn (L. Wen)
a These authors contributed equally to this work.
【DOI】
https://doi.org/10.1016/j.birob.2022.100077
【全文链接】

期刊信息
Biomimetic Intelligence and Robotics (BIROB, ISSN 2667-3797, CN 37-1527/TP)聚焦仿生智能与机器人领域,主要发表高质量原创理论和应用研究成果,涉及领域包括但不限于:仿生设计、仿生材料、仿生驱动与感知、工业机器人、服务机器人、特种机器人、医疗机器人、微型和纳米机器人、软体机器人、外骨骼系统、机器学习、人机交互、运动学和动力学、运动规划与控制、自主系统、多机器人系统等。期刊接收包括原创研究论文、综述、短篇通讯等多种类型的文章,目前对作者和读者均免费,平均审稿周期30天,诚邀广大学者将高质量的创新成果投稿至本刊。期刊将为仿生智能和机器人领域最具创新性的新发现和最具影响力的应用提供国际交流平台,以促进机器人学、仿生学和人工智能领域的进步和原创性贡献。

期刊官网:
https://www.journals.elsevier.com/biomimetic-intelligence-and-robotics
期刊联系方式:
bir@sdu.edu.cn
投稿网址:
https://www.editorialmanager.com/birob/default1.aspx
