
视频赏析
内容摘要
自然腔道内窥镜手术(NOTES)具有无表面创伤,患者痛苦小且住院时间短等特点。气腹术是获得腹腔内手术空间的一项重要技术,但该技术可能会对血液动力产生严重的不良影响。本文提出了一种新型腹腔内支撑机构(IAWL),可以在功能上取代经阴道腔道内窥镜手术(vNOTES)所需要的气腹术,避免与气腹术有关的并发症。IAWL主要由外层弹性条和内层弹性条组成,外层弹性条用于支撑腹腔臂以获取手术空间,内层弹性条安装有可自由旋转的摄像头,能为手术提供宽阔的视野,最大可达气腹术提供的82.74%的手术视野。文章详细讨论了装置的设计原理和运动学特性,并搭建了原型样机,验证了所提方法的可行性。
图文导读
(一)腹腔内支撑机构的组成。如图2所示,该装置有2种工作状态,即适合穿过狭窄通道的初始状态(图2 a.1)和能够获取大的腹腔内手术空间的手术状态(图2 a.2)。
该设计主要由弹性条和钢丝绳组成,包含内、外2层。外层由1个近端连接块、1个远端连接块和3个支撑条组成(图2 b.1),用于vNOTES中提升腹腔壁以获得手术空间。外层支撑条的内侧安装有发光二极管为手术提供照明条件(图2 b.2),每个支撑条上有3个带小环的锚定销,用于钢丝绳布线。内层只有1个支撑条(图2 c.2),支撑条上安装有摄像头(图2 c.1),内层可以围绕支撑装置的轴线旋转,为手术提供更宽阔的视野。图1 (d.1)-(d.3)展示了电缆布线、部件安装以及拉杆的使用等信息。
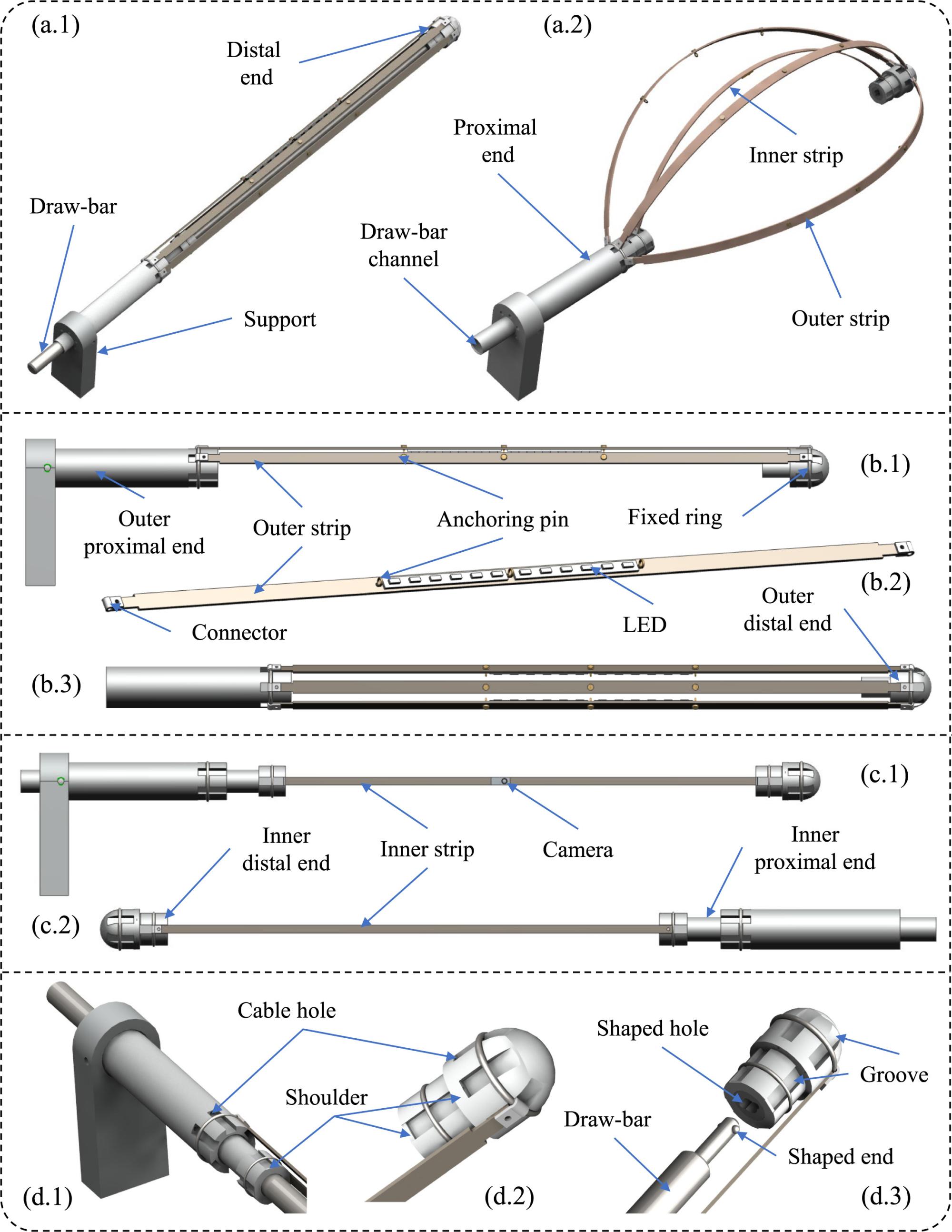
图2 腹腔内支撑机构的组成
(二)腹腔内支撑机构在vNOTES中的使用流程。1. 借助低压气腹术将腹腔撑开。2. 将IAWL从患者阴道和子宫造口置入腹腔。3. 在拉杆的辅助下,机构从初始状态变换成手术状态。4. 去掉气腹术并且拉出拉杆,伸入手术器械进行手术操作。5. 手术后退出手术器械,并插入拉杆,将机构从手术状态变为初始状态,抽出整个支撑机构。6. 闭合子宫造口,结束手术。(三)腹腔内支撑机构在手术中与患者身体组织间的关系。如图3所示,IAWL的主要尺寸为:
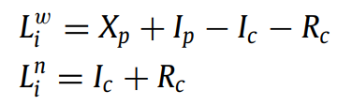
式中:Liw为机构在初始状态下工作部分长度,Lin为非工作部分长度,Xp为耻骨联合到胸骨剑突的距离,Ip为耻骨联合到阴道口的距离,Ic为宫颈中心到阴道口的阴道长度,Rc为宫颈中心到子宫入口的距离。
根据现有的统计数据,便可确定机构的长度和直径。
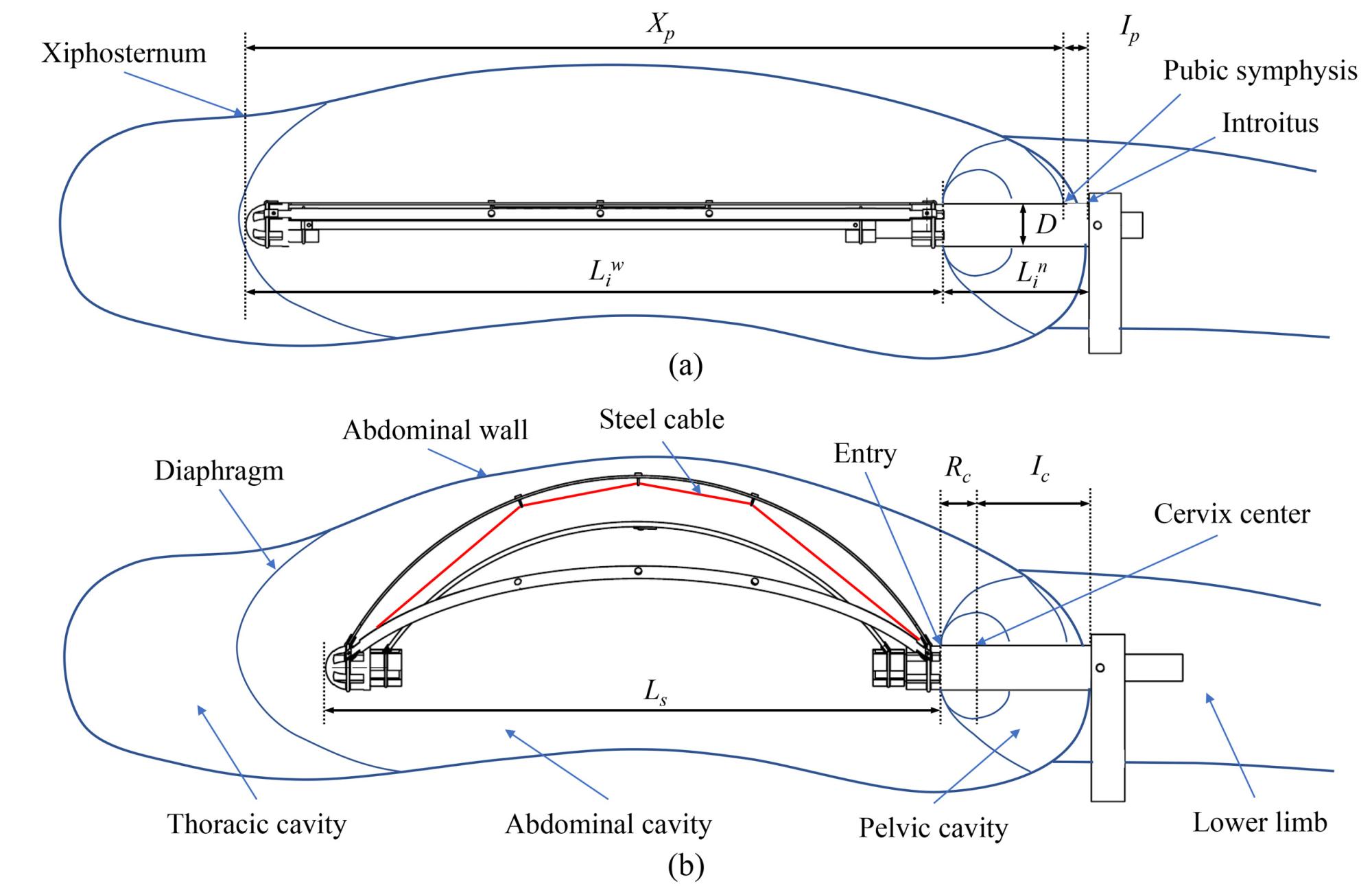
图3 腹腔内支撑机构的2种状态在患者体内的展示图
(四)外层3个支撑条间夹角和支撑条上锚定销数量的确定。图4(a)是气腹术下人体腹腔的横断面示意图,图4(b)是在3个支撑条的作用下表现出的形状。确定3个支撑条间夹角的依据是使得横断面的面积尽可能大,最后通过计算可得α≈60°。
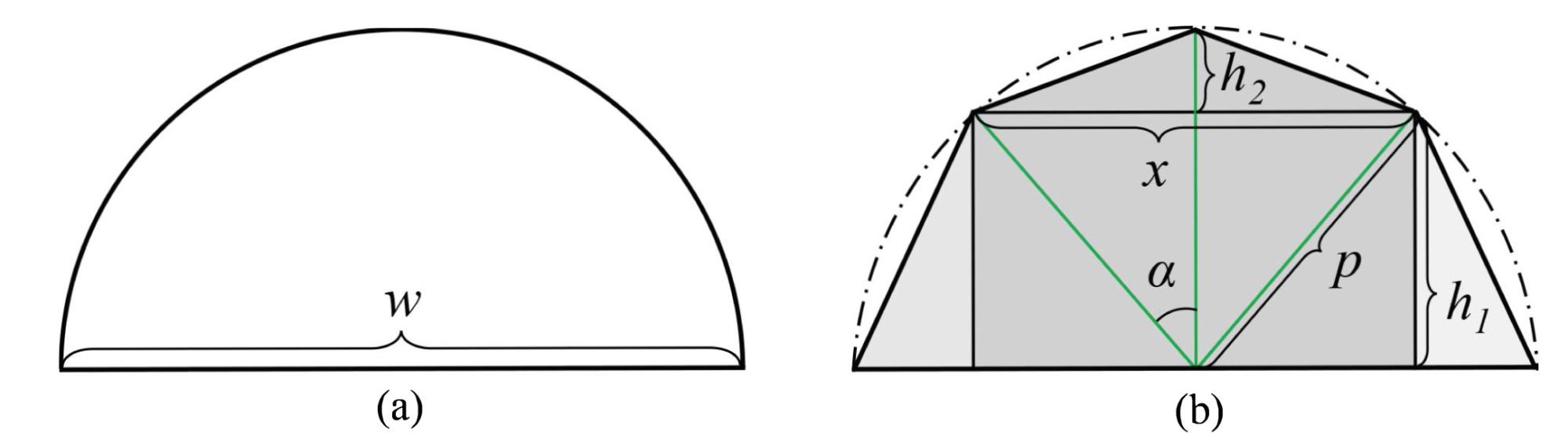
图4 人体腹腔横断面示意图
锚定销数量对钢丝绳拉力的影响如图5所示,图中(a)和(b)分别展示了在1个支撑条上有1个和2个锚定点对钢丝绳拉力的影响。
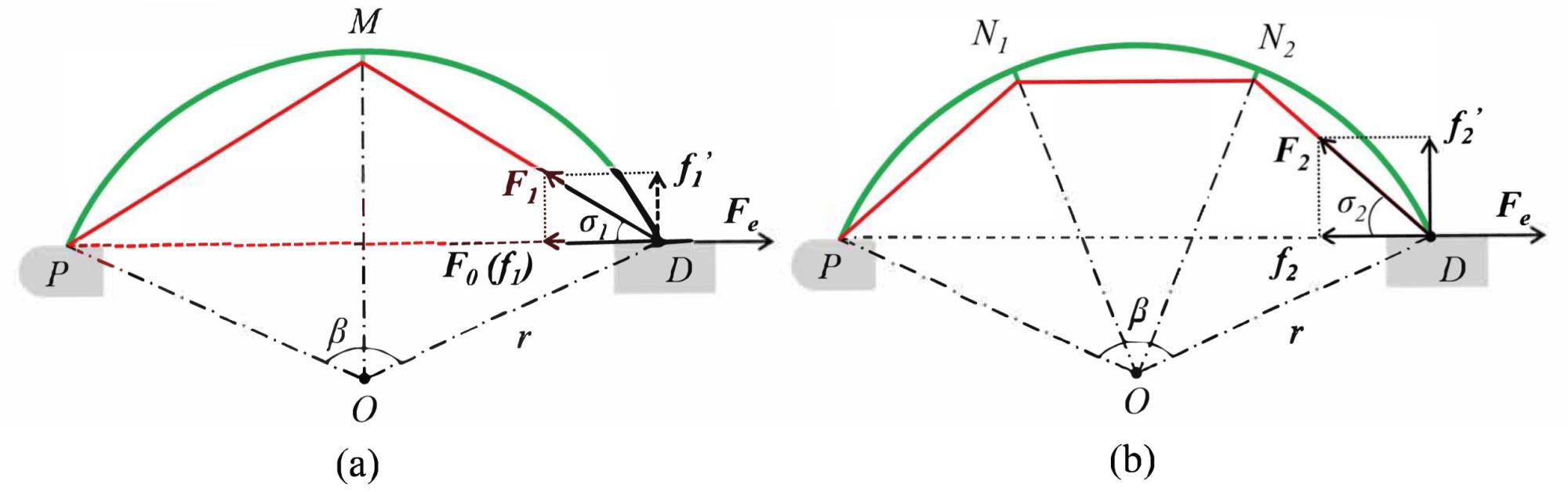
图5 不同锚定销数量对钢丝绳拉力的影响
通过图5展示的几何关系可得:
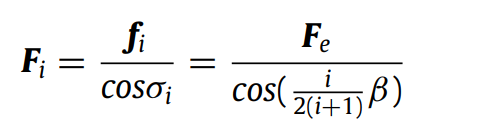
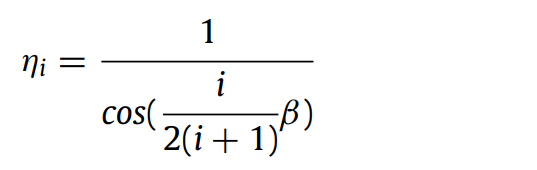
由图6可以看出,锚定数i越多,系数ηi越大,也就是需要更大的钢丝绳拉力,这会降低手术空间的稳定性;夹角β越小,需要的钢丝绳拉力越小,但会减少手术空间。为保证手术空间足够大且稳定,最终确定锚定数为2。
图6 锚定数i、夹角β对钢丝绳拉力系数ηi的影响
(五)不同拉杆位移量e下支撑条支撑高度v的确定。根据运动学分析可得:
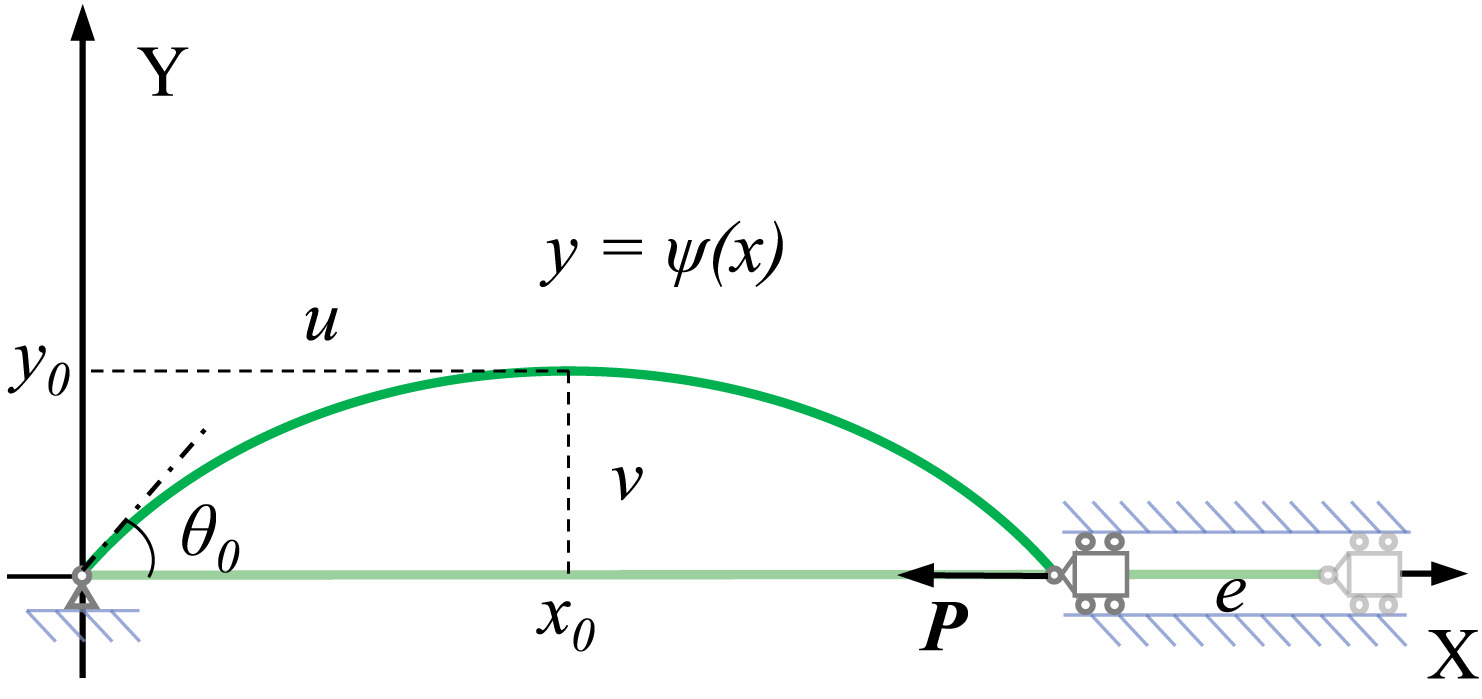
图7 拉杆位移量和支撑条支撑高度关系图
(六)本文采用多种材料和尺寸的支撑条(表1)开展对比实验,实验场景如图9所示。
表1 验证运动学使用的支撑条规格
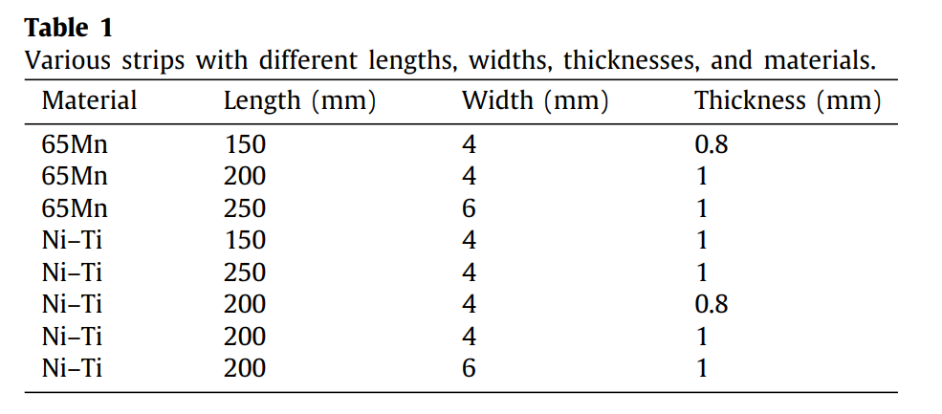
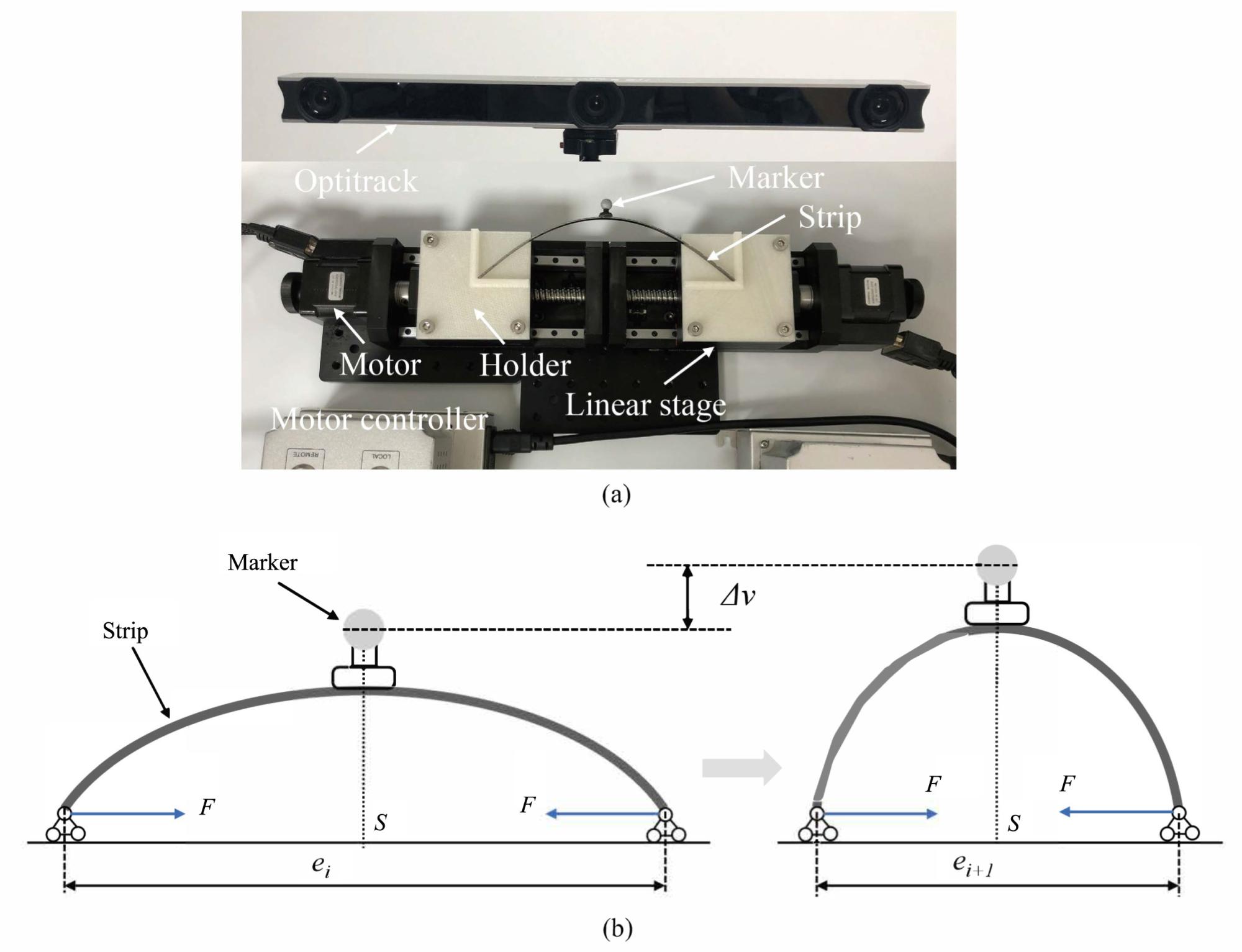
图9 运动学验证实验场景和实验原理
理想模型与不同长度(150 mm/200 mm/250 mm)、宽度(4 mm/6 mm)、厚度(0.8 mm//1 mm)和材料(65Mn/Ni-Ti)的支撑条的实验结果比较如图10 (a.1)-(a.4)所示。图10 (b.1)-(b.4)展示了对应实验条件下拉杆位移量与支撑条高度误差的关系。
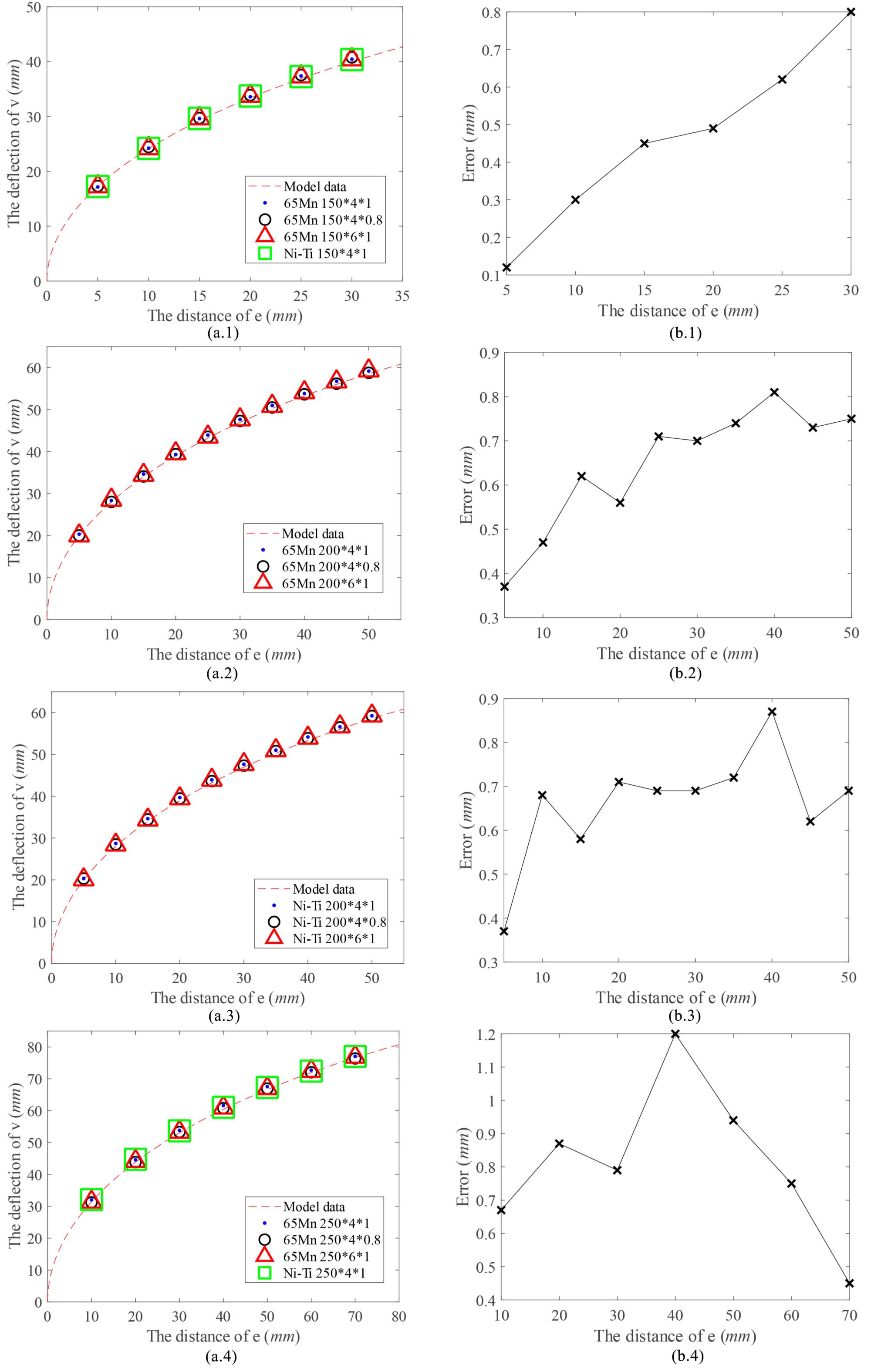
图10 运动学验证实验结果
根据上述尺寸和设计原理,搭建了一套腹腔内支撑机构样机,验证了上述设计的可行性,测试结果如图11所示。
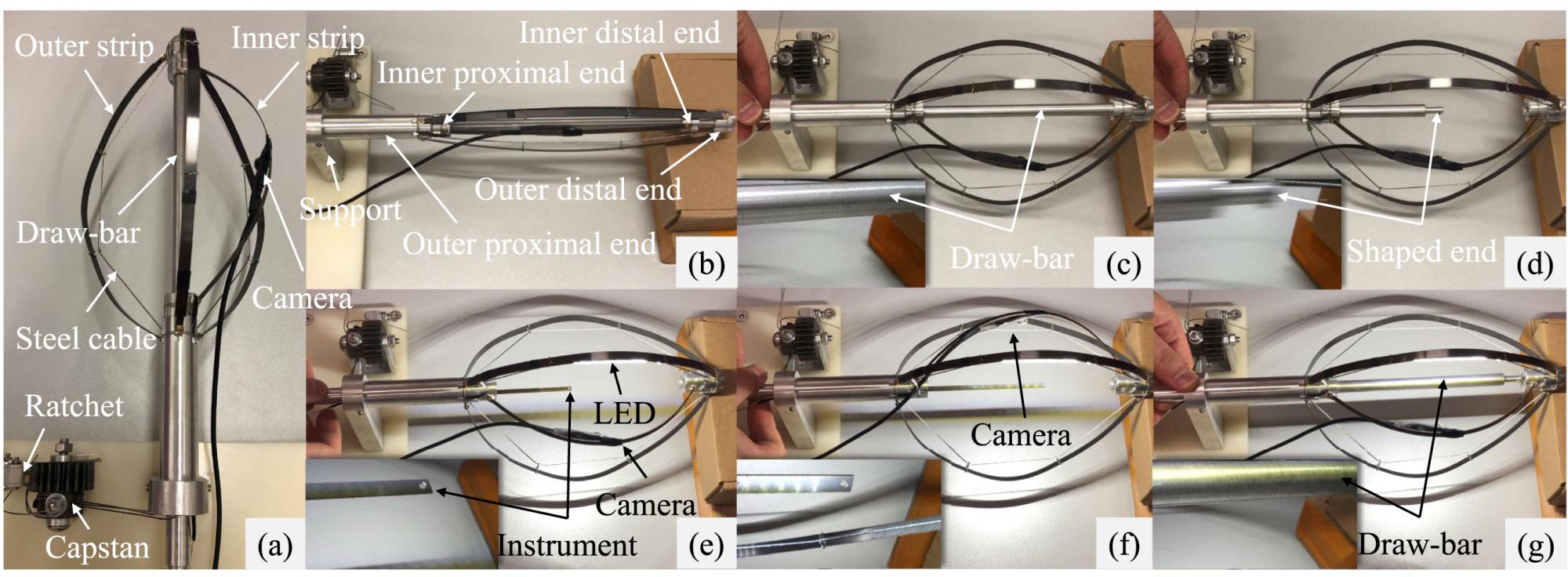
图11 腹腔内支撑机构样机搭建及可行性实验
为避免气腹术引起的并发症,本文提出了一种替代气腹术的腹腔内支撑机构。通过对装置关键尺寸和设计参数的讨论与确定,搭建了实验样机,并验证了该设计的可行性。
【作者信息】
Jie Wang1,2,a, Yue Zhou1,a,Xiao Xiao3,*,Jiaole Wang4,Li Liu1,*,b
1 Department of Electronic Engineering, The Chinese University of Hong Kong, Hong Kong 999077, China
2 Department of Biomedical Engineering, Tsinghua University, Beijing 100084, China
3 Department of Electronic and Electrical Engineering, Southern University of Science and Technology, Shenzhen 518055, China
4 Department of Mechanical Engineering and Automation, Harbin Institute of Technology (Shenzhen), Shenzhen 518055, China
* Author to whom correspondence should be addressed: xiaox@sustech.edu.cn, liliu@cuhk.edu.hk
【DOI】
https://doi.org/10.1016/j.birob.2023.100090
【全文链接】

期刊信息
Biomimetic Intelligence and Robotics (BIRob, e-ISSN 2667-3797, p-ISSN 2097-0242, CN 37-1527/TP)聚焦仿生智能与机器人领域,主要发表高质量原创理论和应用研究成果,入选2019年“中国科技期刊卓越行动计划”高起点新刊类项目(第一批),期刊已被DOAJ和Scopus数据库收录。
涉及领域包括但不限于:仿生设计、仿生材料、仿生驱动与感知、工业机器人、服务机器人、特种机器人、医疗机器人、微型和纳米机器人、软体机器人、外骨骼系统、机器学习、人机交互、运动学和动力学、运动规划与控制、自主系统、多机器人系统等。期刊接收包括原创研究论文、综述、短篇通讯等多种类型的文章,目前对作者和读者均免费,平均审稿周期30天,诚邀广大学者将高质量的创新成果投稿至本刊。期刊将为仿生智能和机器人领域最具创新性的新发现和最具影响力的应用提供国际交流平台,以促进机器人学、仿生学和人工智能领域的进步和原创性贡献。

期刊官网:
https://www.sciencedirect.com/journal/biomimetic-intelligence-and-robotics
期刊联系方式:
bir@sdu.edu.cn
投稿网址:
https://www.editorialmanager.com/birob/default1.aspx
