
视频赏析
内容摘要
机械阻抗是描述和调节机器人运动控制与人类运动控制的重要变量,论文设计了一个在线阻抗自适应控制器(OIAC)用于可穿戴机器人(外骨骼),讨论了在线阻抗自适应控制在小于1 s的快速运动控制(操纵灵活的鞭子)、手臂和手指阻抗量化、多功能外骨骼控制和模仿人类手臂的机器人控制等方面的应用,提出的Python代码和应用实例丰富了交互式机器人的工具箱。
图文导读
(一)在线阻抗自适应控制器。OIAC是基于反馈控制的比例微分控制器,用于产生机器人的关节扭矩:

(二)应用一:像人类一样快速操纵灵活的物体。图2展示了将在线阻抗自适应控制器集成到动态运动基元(DMPs)中,用于快速挥舞手臂击打目标的控制框架。图2(a)是快速挥舞手臂的时间序列,图2(b)是OIAC与DMPs集成控制的框架。
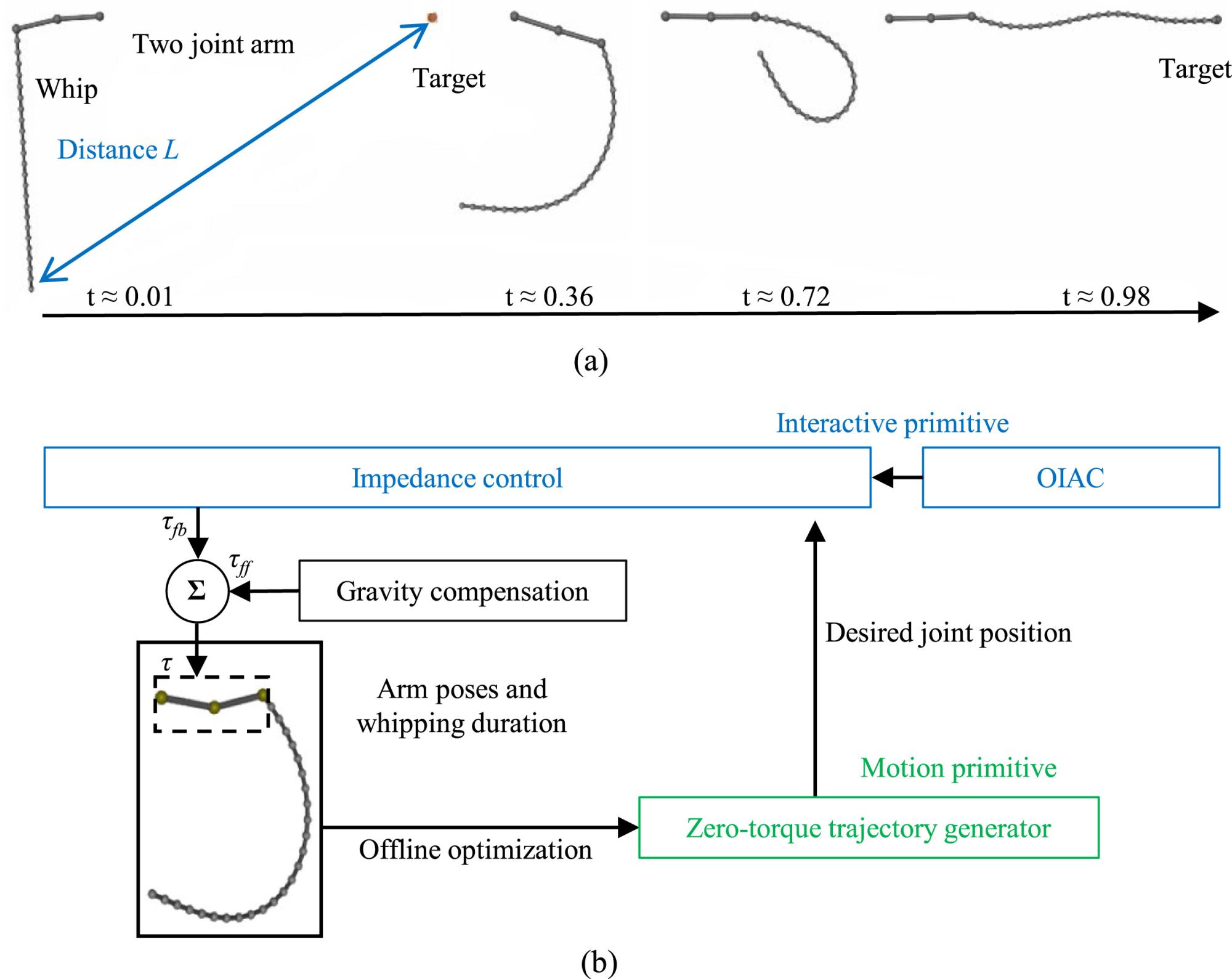
图2 集成OIAC与DMPs用于快速运动控制
挥舞手臂击打目标的快速运动控制实验如图3所示。图3(a)是挥舞模型,图3(b)展示了不同控制方式下肩部和肘部关节的平均误差,与恒定阻抗控制相比,OIAC可以更加准确地跟踪关节运动。如图3(c)所示,OIAC加速了离线运动基元的优化。由图3(d)可以看出,OIAC在不同阻抗控制中可产生较低的刚度和较高的阻尼,更有利于快速运动控制。
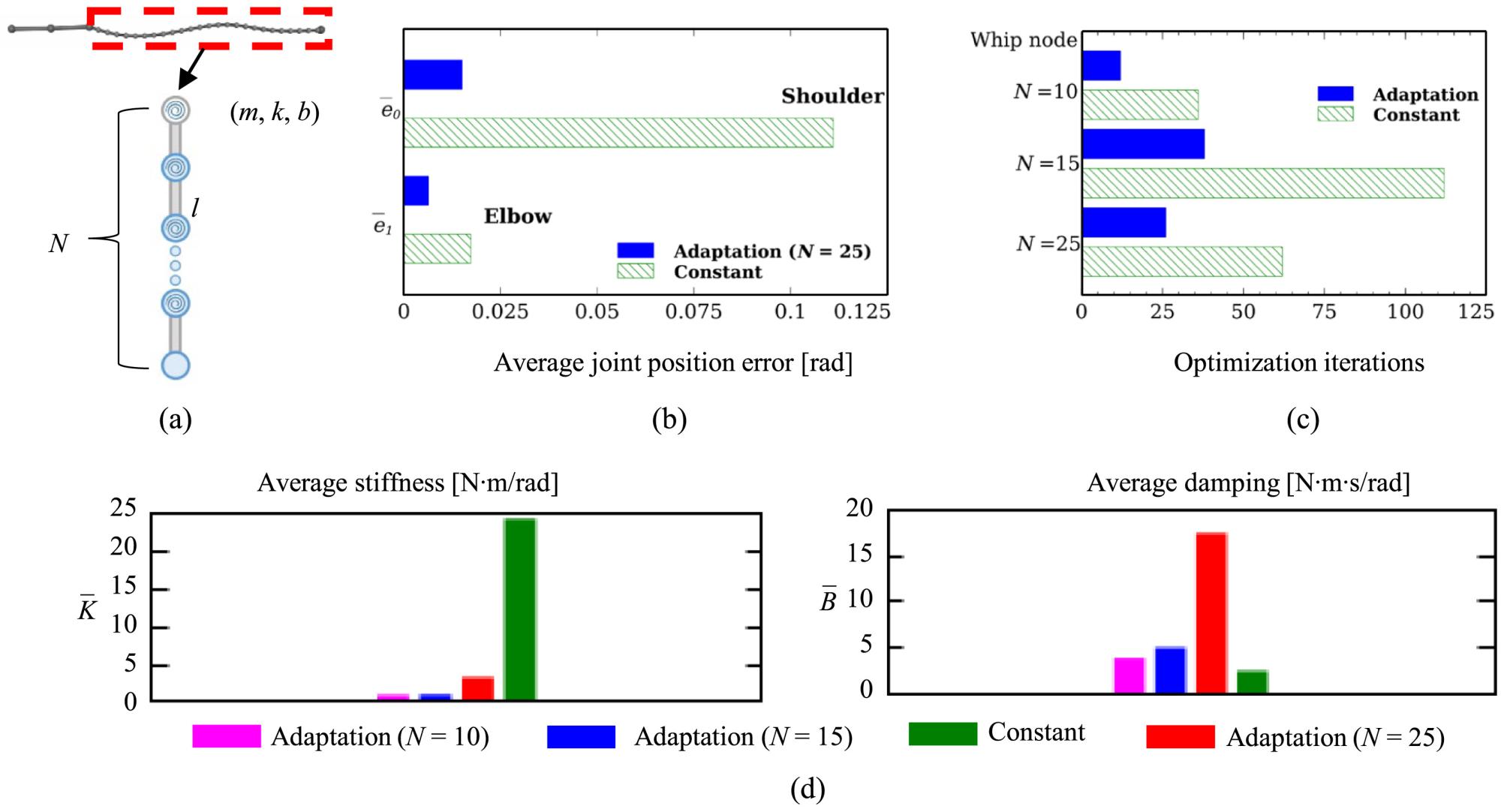
图3 快速运动控制实验
(三)应用二:机械阻抗的量化。将OIAC用于可穿戴式手指(TIE-EXO)和肘部外骨骼(POW-EXO),作为一个“传感器”来量化非线性电阻中的机械阻抗。如图6所示,TIE-EXO由软手套、Dynamixel执行器(XM430-W350-R)、刚性轴、USB通信接口、电源转换器和3个软条带组成。POW-EXO由3D打印的聚乳酸部件、铝制连接器和Dynamixel执行器(XM430-W350-R)组成。OIAC控制量化手指和肘部交互阻抗的原理如图7所示。
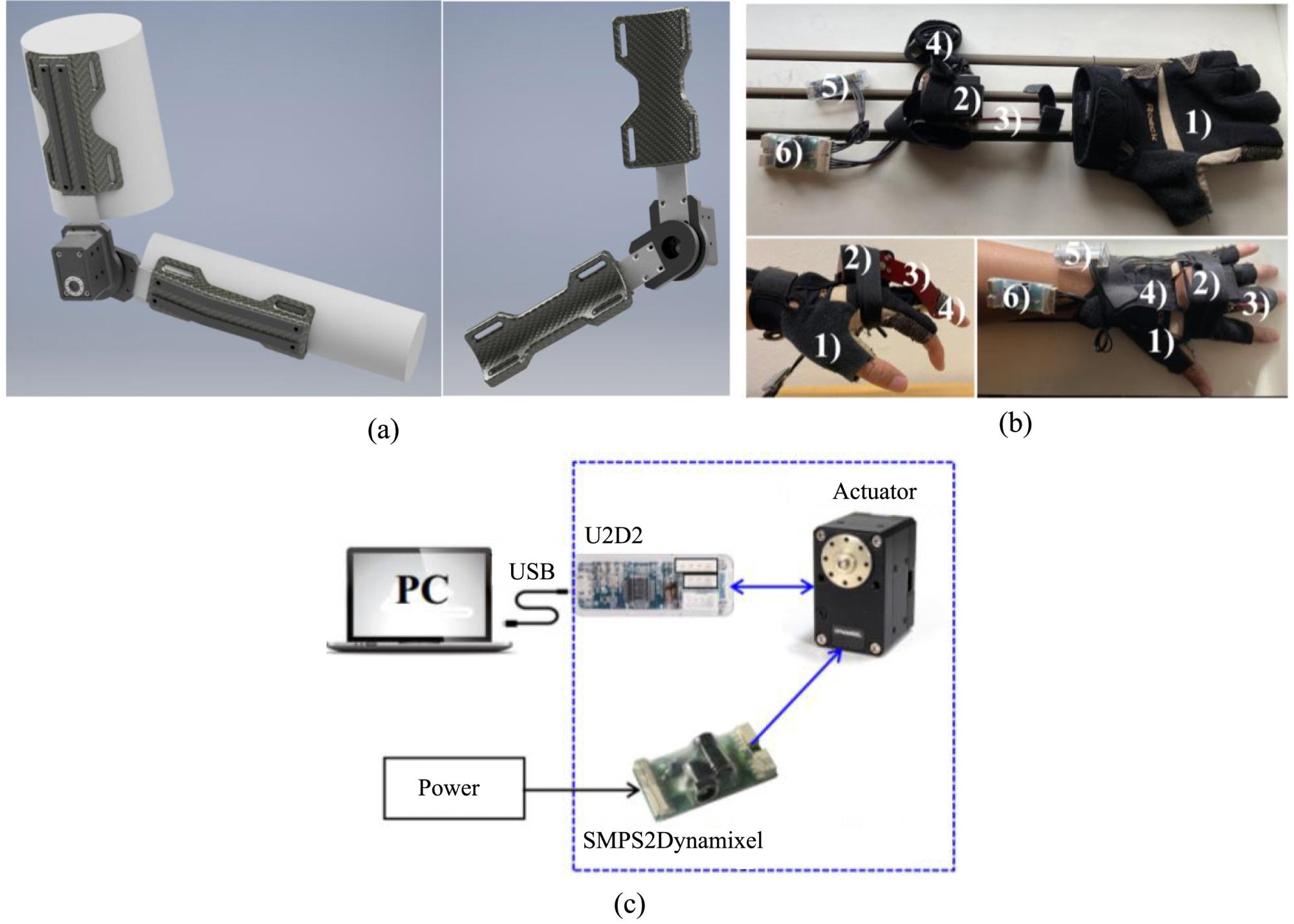
图6 肘部和手指外骨骼设计
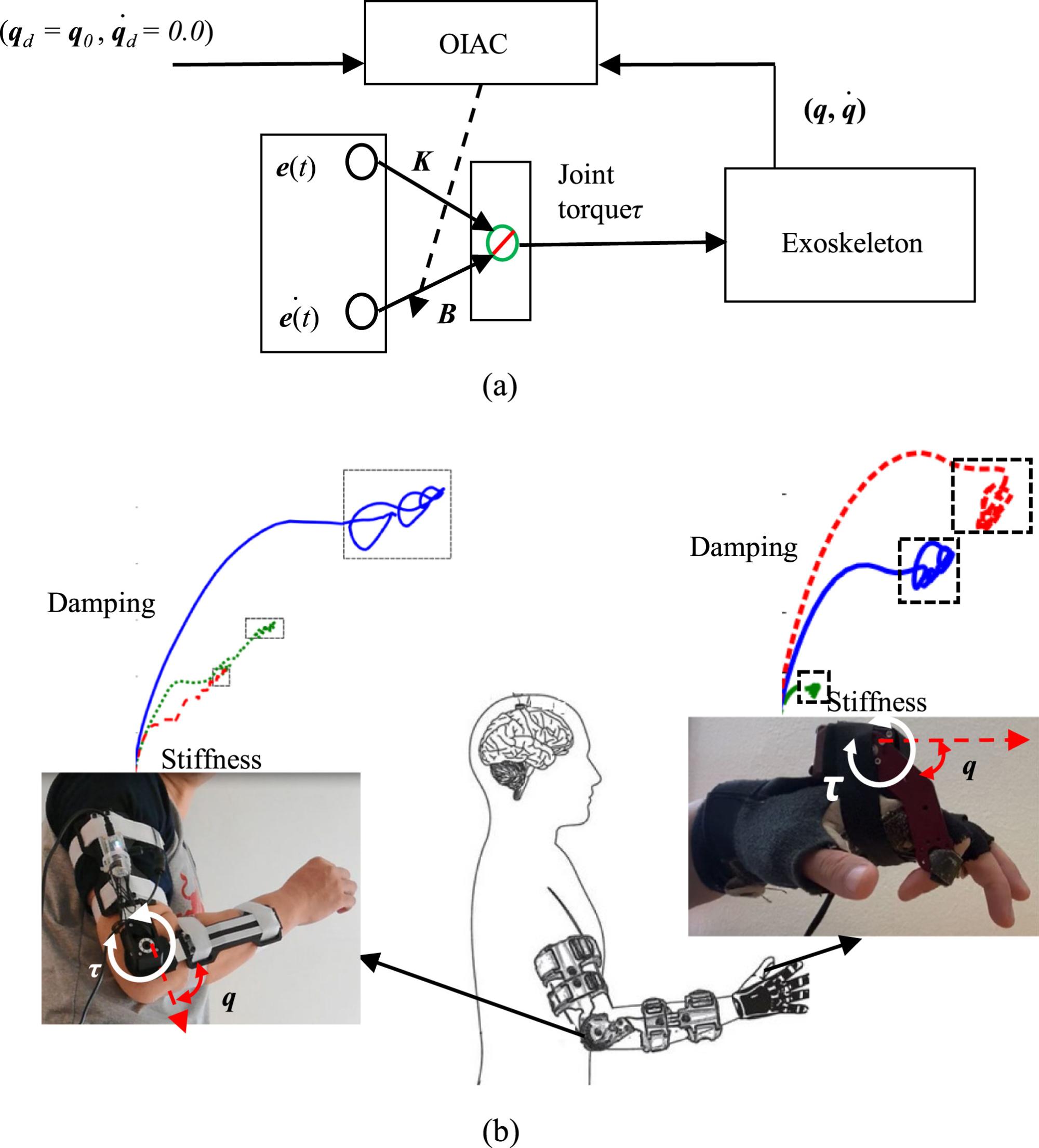
图7 OIAC控制实现阻抗量化的原理
(四)应用三:多功能外骨骼控制。当前的外骨骼设计存在重量较大、功能单一且过度依赖于力、肌肉传感和弹簧等问题,限制了外骨骼在家庭康复和健身领域的大规模应用。本文提出了一种基于学习的多功能肘部外骨骼控制模型,可实现按需协助(AAN)功能和按需抵制(RAN)功能。图10(a)展示了OIAC与迭代学习的集成控制模型,图10(b)是使用者佩戴外骨骼的效果图。
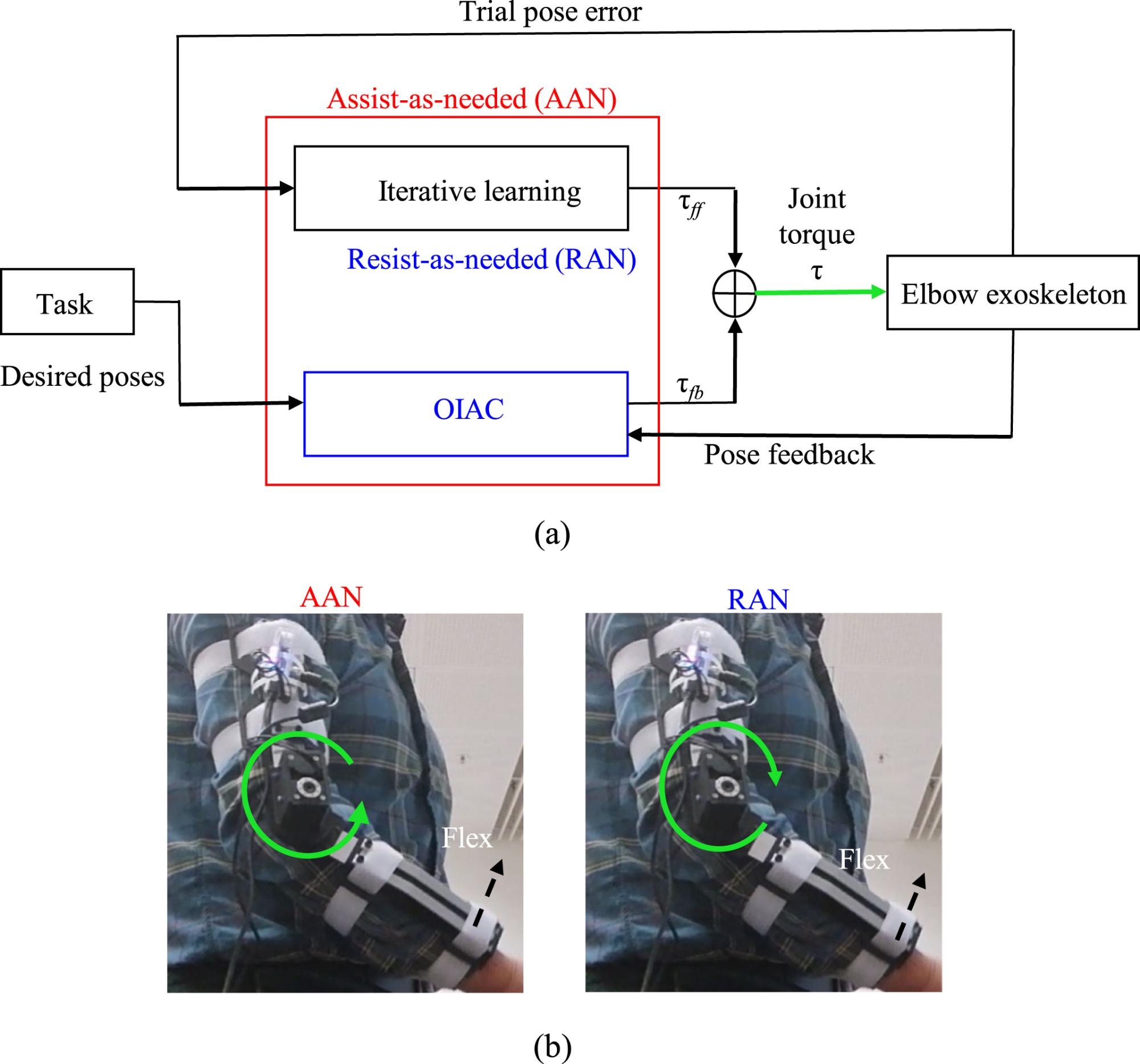
图10 多功能外骨骼控制模型
与传统的AAN控制旨在最大限度地提高穿戴者参与度不同的是,本文提出的AAN使POW-EXO能够产生运动辅助,以补偿穿戴者非自愿(反射性)运动。如图11所示,本文选择了3个受试者(S1-S3)佩戴了POW-EXO,每个受试者进行了16次试验。第1-4行分别是平均位置误差,学习到的前馈扭矩的中位数和偏差,以及阻抗参数。蓝色、 红色和绿色分别描述了受试者S1-S3的实验结果。
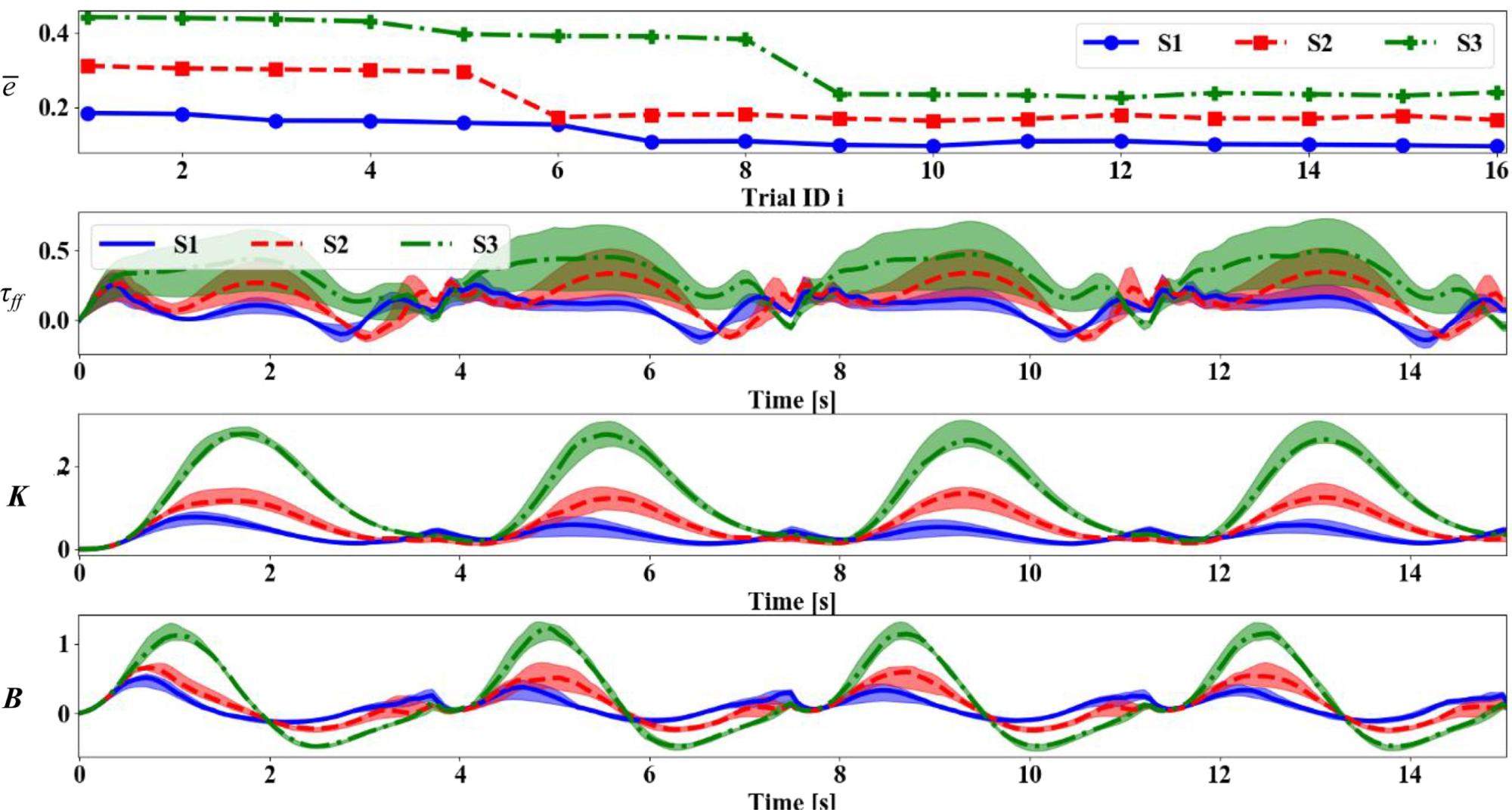
图11 集成OIAC和迭代学习的控制模型完成AAN任务的效果
图12展示了3个受试者佩戴POW-EXO完成RAN任务的效果,第1-5行分别是关节控制扭矩的中位数和偏差、阻抗参数、位置和速度的误差。
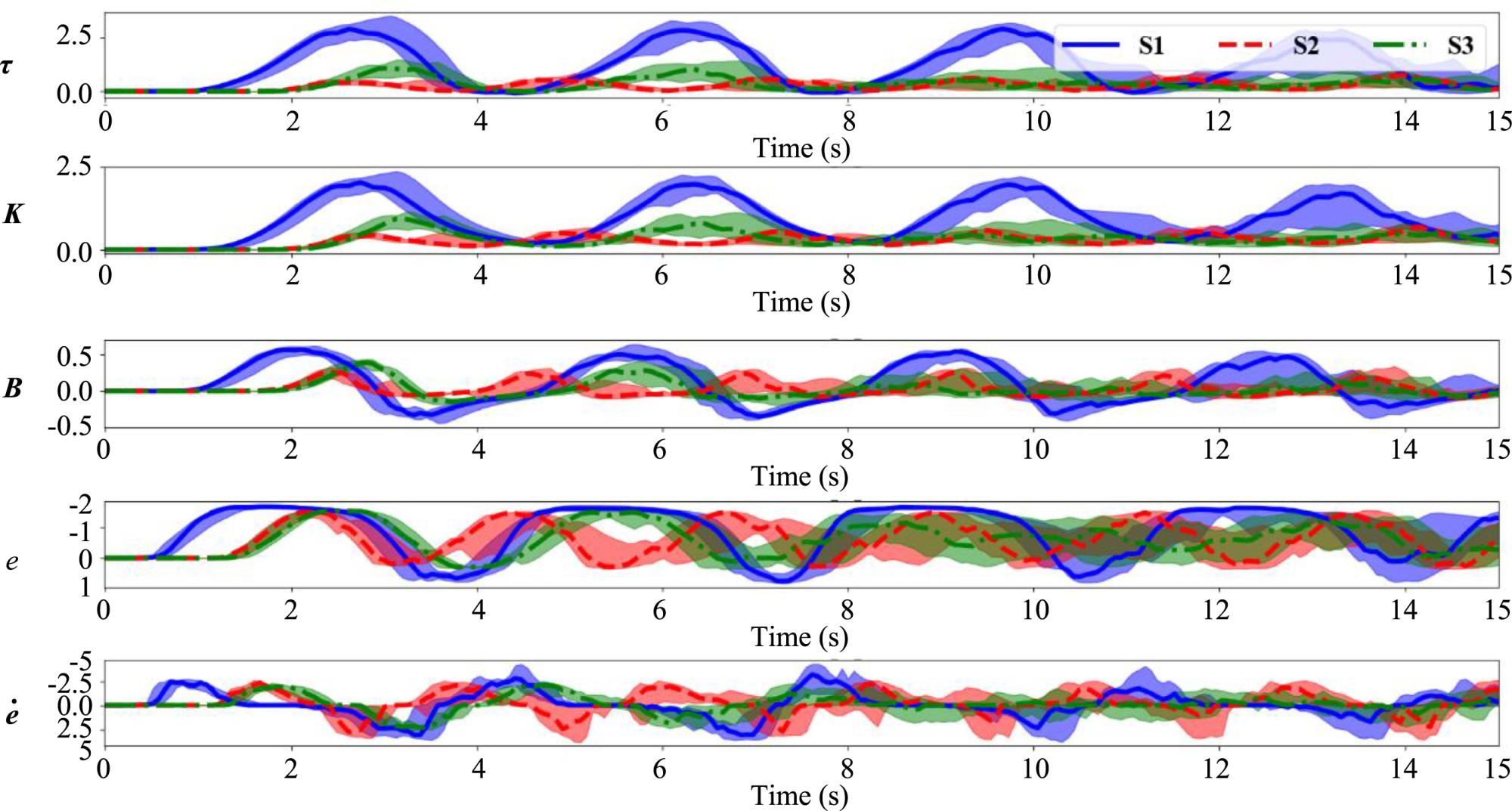
图12 集成OIAC和迭代学习的控制模型完成RAN任务的效果
(五)应用四:双关节机器人手臂的周期性摆动控制。通过本文提出的模型,仅需10次试验即可实现机器人手臂稳定地学习摆动任务,而目前最先进的学习算法需要上千次的试验才能完成。在线感知运动学习与适应模型在10次试验中的周期性联合轨迹跟踪效果如图15所示。
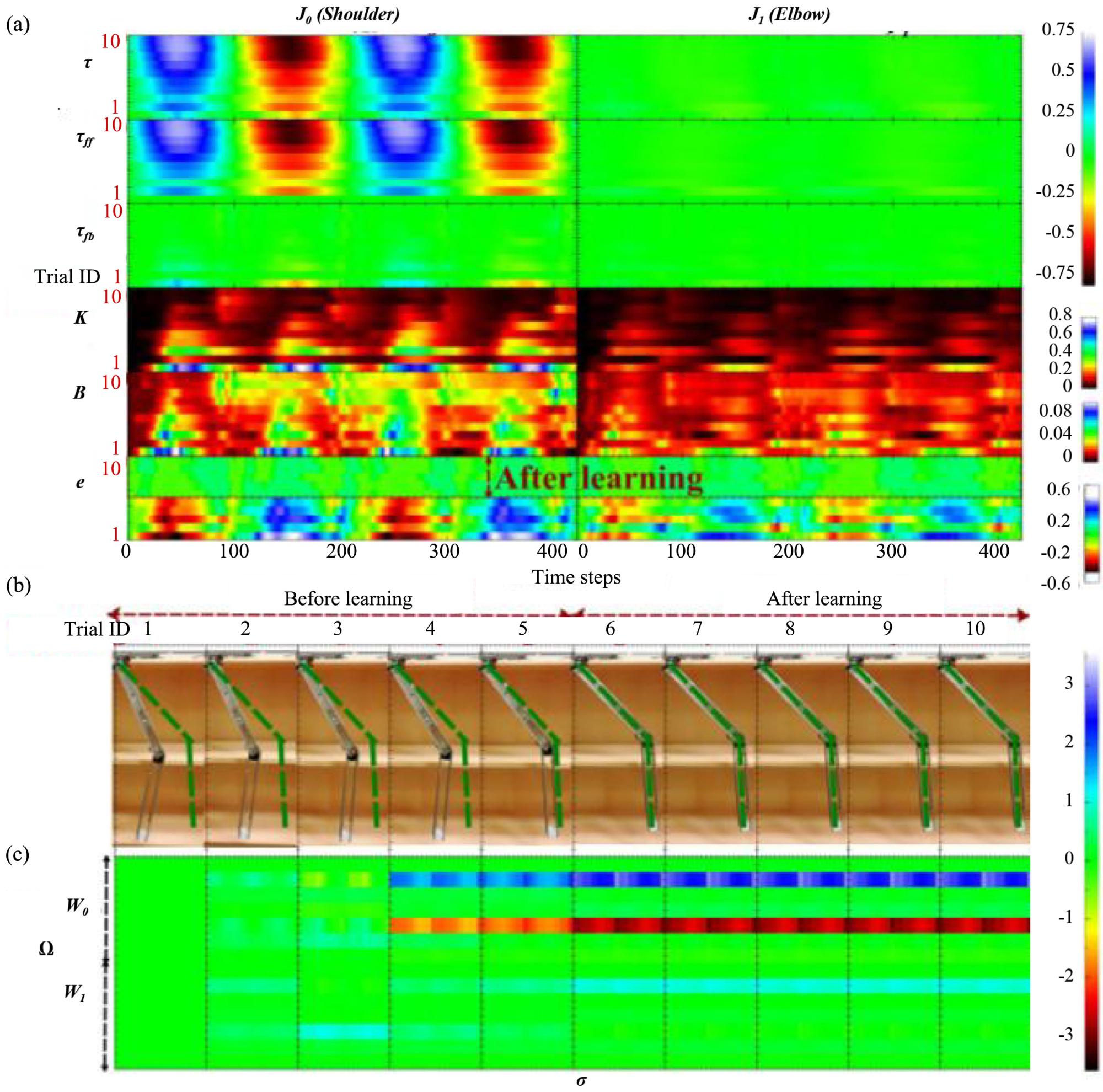
图15 在线SEED模型在10次试验中的周期性联合轨迹跟踪
本文提出了可用于多种控制任务的在线阻抗自适应控制器,该控制器通过对机器人关节的阻抗进行实时测量和自适应调整,使得机器人能够实时适应人的输入,实现了更加流畅和自然的交互控制。
【作者信息】
Xiaofeng Xiong1,*, Cheng Fang2
1 SDU Biorobotics, the Mærsk Mc-Kinney Møller Institute, the University of Southern Denmark, Odense 5230, Denmark2 SDU Robotics, the Mærsk Mc-Kinney Møller Institute, the University of Southern Denmark, Odense 5230, Denmark* Author to whom correspondence should be addressed: xizi@mmmi.sdu.dk
【DOI】
https://doi.org/10.1016/j.birob.2023.100100
【全文链接】

期刊信息
Biomimetic Intelligence and Robotics (BIRob, e-ISSN 2667-3797, p-ISSN 2097-0242, CN 37-1527/TP)聚焦仿生智能与机器人领域,主要发表高质量原创理论和应用研究成果,入选2019年“中国科技期刊卓越行动计划”高起点新刊类项目(第一批),期刊已被DOAJ和Scopus数据库收录。
涉及领域包括但不限于:仿生设计、仿生材料、仿生驱动与感知、工业机器人、服务机器人、特种机器人、医疗机器人、微型和纳米机器人、软体机器人、外骨骼系统、机器学习、人机交互、运动学和动力学、运动规划与控制、自主系统、多机器人系统等。期刊接收包括原创研究论文、综述、短篇通讯等多种类型的文章,目前对作者和读者均免费,平均审稿周期30天,诚邀广大学者将高质量的创新成果投稿至本刊。期刊将为仿生智能和机器人领域最具创新性的新发现和最具影响力的应用提供国际交流平台,以促进机器人学、仿生学和人工智能领域的进步和原创性贡献。

期刊官网:
https://www.sciencedirect.com/journal/biomimetic-intelligence-and-robotics
期刊联系方式:
bir@sdu.edu.cn
投稿网址:
https://www.editorialmanager.com/birob/default1.aspx
