内容摘要
近年来,四足机器人发展迅速,展现出高动态运动能力、高环境适应性、多运动模式等特点,并初步在应急处置、工程作业、军事侦察等领域得到应用。本文基于已有文献资料的调研,在四足机器人的发展、结构、控制、作业这四方面展开综述,梳理了四足机器人的发展路线,从步态切换、足地交互、扰动控制、地形适应等方面分析了多种四足机器人仿生结构与运动控制方法的优缺点,并且归纳了代表性腿足移动作业机器人平台及面向足臂协同多任务作业的控制方法。总结当前技术发展与应用需求,四足+多作业肢的多肢多运动模式的超仿生机器人技术研究将具有巨大的学术与应用前景。
图文导读
研究人员以四足哺乳动物为仿生对象进行了四足机器人的研究,寄希望于四足机器人在野外环境物资运输、环境探测、灾难救援等方面发挥作用。研究聚焦于机器人的复杂环境适应能力、承载能力和作业能力等方面,使得四足机器人的结构设计与控制技术得到了大跨步发展。
合适的四足机器人拓扑结构是能在复杂环境中实现稳定灵活运动的基础,如图2所示。本文以哺乳动物类和爬行类的腿部结构为仿生对象,在构型、能量、稳定性、动态性、负载能力等方面进行了分析,分别总结了爬行、步行、爬步结合构型的优势及其应用场景。
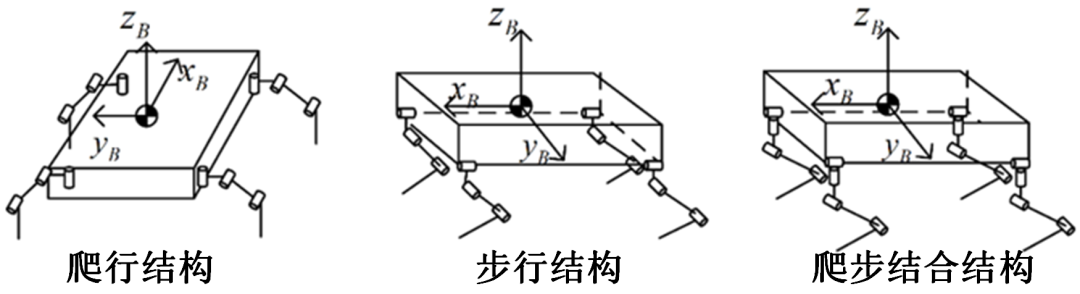
图2 四足机器人的拓扑结构
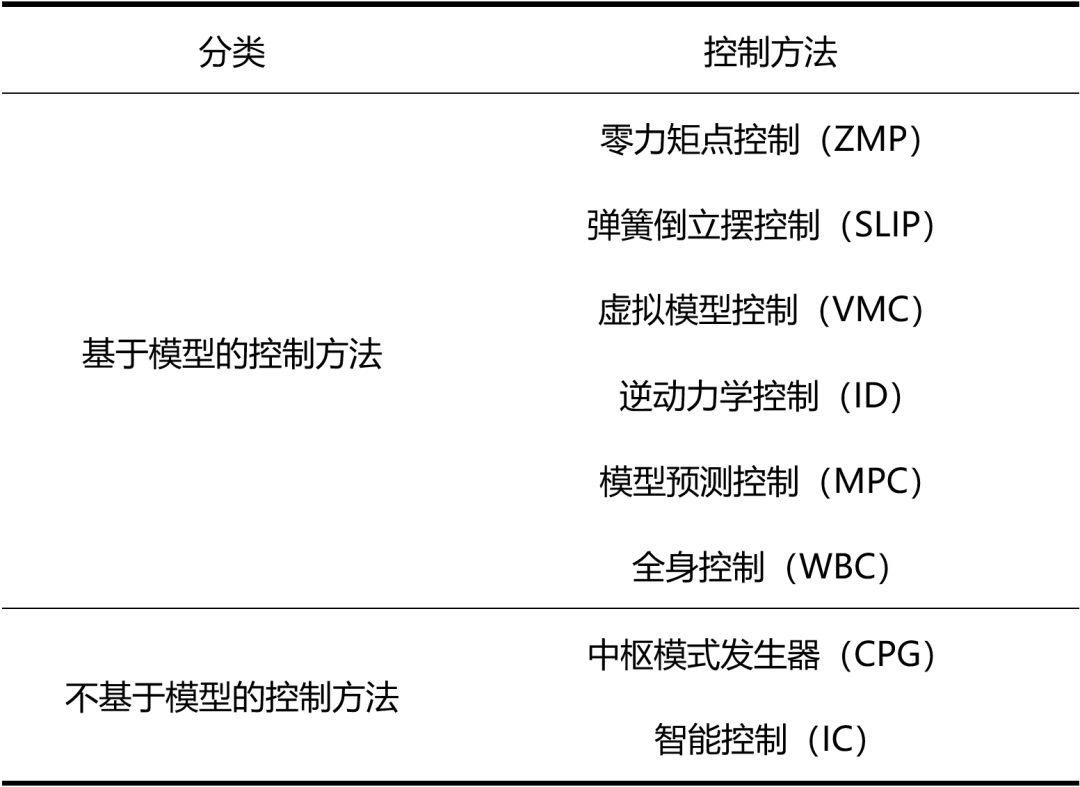
四足机器人是一个多输入多输出的高维欠驱动系统,具有高度非线性和多变量强耦合的特点,复杂的环境交互性增加了其控制难度。如表1所示,将四足机器人控制方法分为基于模型的控制方法和无模型控制方法,对所调研的控制方法的模型、算法等进行了详细的梳理。
表1 四足机器人运动控制方法
为充分发挥腿足式浮动基座的运动优势,改善四足机器人作业能力不足、效率低下的问题,本文在腿足机器人作业模式、作业规划与控制以及实际应用场景等方面进行整理,着重阐述了典型的腿足式移动作业平台以及全身控制方法。图13展示了目前国内外具有代表性的腿足式移动作业平台。
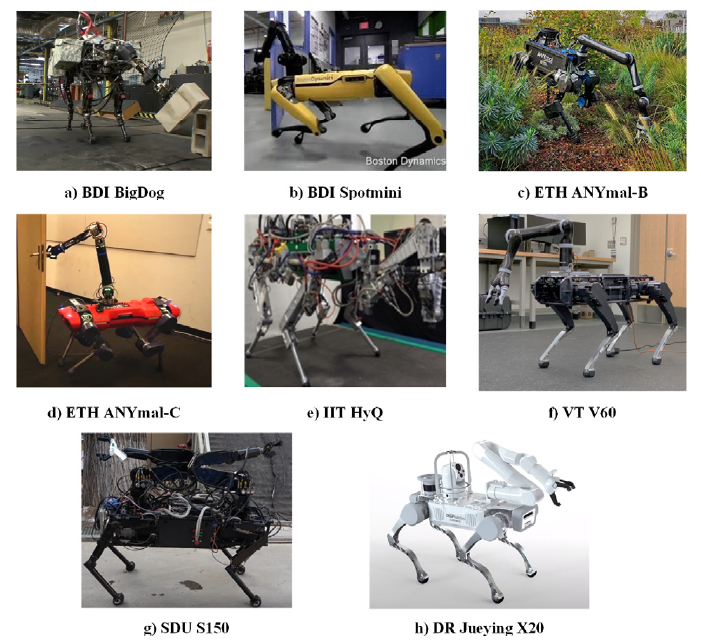
图13 典型腿足式移动作业平台
【作者信息】
Hui Chaia,b, Yibin Lia,b, Rui Songa,b, Guoteng Zhanga,b, Qin Zhanga,b,c, Song Liua,b, Jinmian Houa,b,Yaxian Xina,b, Ming Yuana,b, Guoxuan Zhanga,b,Zhiyuan Yanga,b
a School of Control Science and Engineering, Shandong University, Jinan 250061, China
b Engineering Research Center of Intelligent Unmanned System, Ministry of Education, Shandong University, Jinan 250061, China
c School of Electrical Engineering, University of Jinan, Jinan 250022, China
* Corresponding author, E-mail address: liyb@sdu.edu.cn
【DOI】
https://doi.org/10.1016/j.birob.2021.100029
【全文链接】

