内容摘要
四足机器人目前已被广泛应用在灾难救援、环境探索等领域,波士顿动力四足机器人在相关应用领域已经崭露头角。本文作者为解决波士顿动力Spot四足机器人在恶劣环境下安全无碰撞的定点自主导航问题,通过研究障碍物在占用地图中的风险评估和路径规划,提出了一种基于离线风险地图的自主规划方法。同时,提出了一个集成的软硬件系统,该系统包含对多线激光雷达、IMU等传感器的数据处理,可用于矿洞大范围长距离场景下的四足机器人自主路径规划和导航 。文章的第一节介绍了研究背景;第二节描述了整体的系统架构;第三节提出了四足机器人自主导航的风险感知路径规划框架;第四节通过实验评估了所提方法和集成系统的有效性结果。
图文导读
近年来,无GPS环境中的机器人导航得到了广泛关注。在这样的场景下,机器人通常会面临着恶劣、光线差、无结构化的环境,由于通讯数据传输等影响,人工无法对其导航进行干预,这对机器人的自主导航和决策能力提出了极高的要求。传统的路径规划方法(如A*,D*等)仅考虑了对障碍物当前位置的规划代价,这就导致机器人在执行规划路径时会出现距离障碍物过近,甚至碰撞的情况,从而不利于机器人自主完成导航任务。
针对上述问题,本文首先提出了一种集成的软硬件系统,以满足地下矿洞场景下的机器人导航需求。文中使用的机器人平台为波士顿四足机器人Spot。
本文所提出的集成系统以离线地图、3D雷达点云和IMU数据作为输入,通过Google提供的Cartographer-SLAM算法进行全局定位,然后利用基于风险地图的路径规划算法D*+在线进行路径规划,并将规划的路径发送给机器人执行,如图1所示。
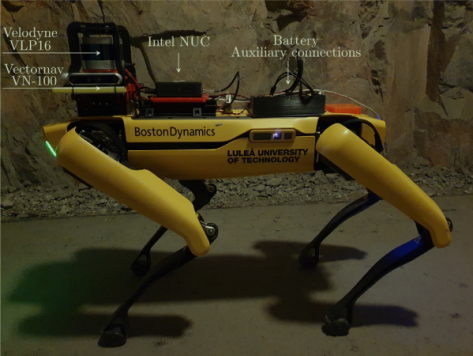
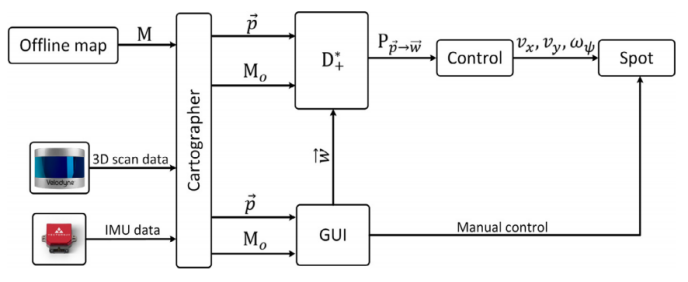
图1 文中提出的四足机器人自主导航集成系统平台及系统框架
在复杂受限环境中,为使机器人能够自主地进行定点导航,单纯使用障碍物膨胀后进行路径规划,容易导致机器人无法进入一些狭小环境 。本文在改进传统A*和D*算法的基础上,提出了D*+规划算法。该算法在使障碍物膨胀的同时,对障碍物进行风险范围评估,从而形成一张风险地图,使机器人可选择一条风险值最低的路径进行导航,如图2所示。

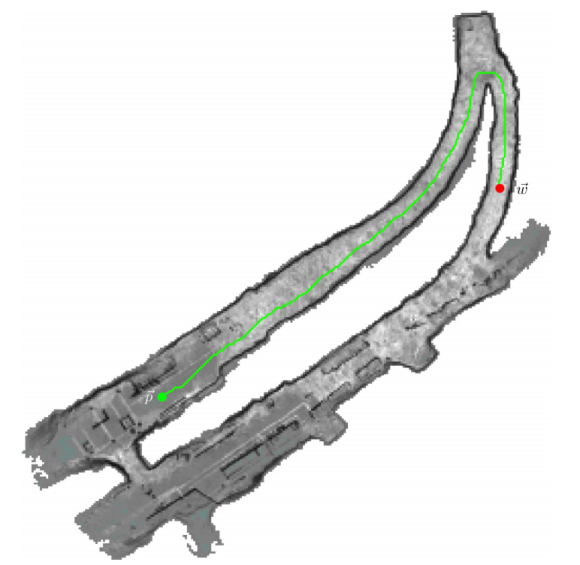
图2 D*+算法路径规划示意图
文中对提出的D*+规划方法进行了不同距离场景下的实验评估,图3为实际场景下D*+在不同起始点的规划路径。
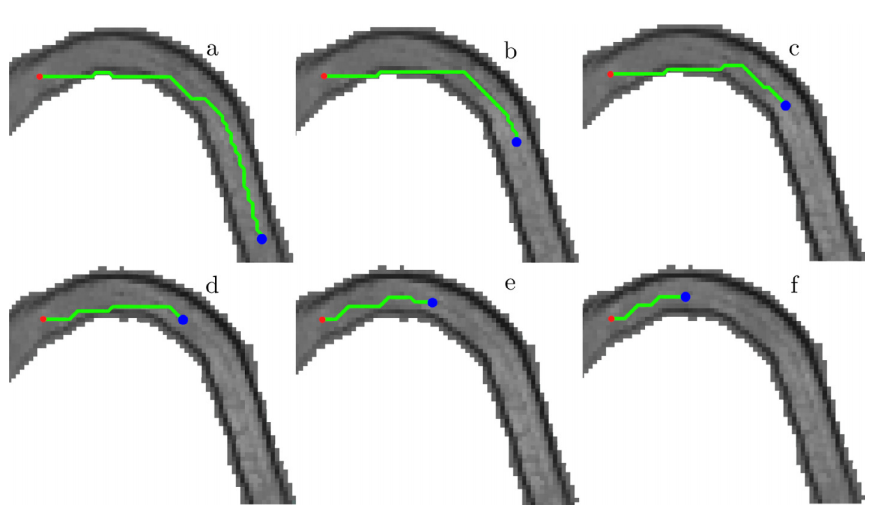
图3 实际场景下D*+算法在不同起始点的规划路径
【作者信息】
Anton Kovala, Samuel Karlssonb, George Nikolakopoulosc
a Department of Computer, Electrical and Space Engineering, Luleå University of Technology, LuleåSE-97187, Sweden.
b Department of Computer, Electrical and Space Engineering, Luleå University of Technology, LuleåSE-97187, Sweden.
c Department of Computer, Electrical and Space Engineering, Luleå University of Technology, LuleåSE-97187, Sweden.
【DOI】
https://doi.org/10.1016/j.birob.2022.100035
【全文链接】