内容摘要
无系绳的微型软体机器人被认为在生物医学领域拥有广阔的前景,然而受限于尺寸,其构型设计和驱动方式目前仍然没有一个成熟的范本。本文作者受海星触角的启发,利于硅胶树脂掺杂软磁颗粒的方式制作了一个多足的软体微型机器人,其总重仅达0.26g。该机器人具有多个运动模态,在外界磁场的驱动下可实现前进、后退、转向、越障等动作。本文介绍和分析了机器人的制作方式和运动机制,并通过迷宫实验展示了该机器人的运动性能。文章的第一节介绍了研究背景;第二节描述了机器人的具体设计与制造过程;第三节基于磁学理论对驱动磁铁进行了建模,结合磁化理论分析阐述了机器人腿足的受驱机制以及机器人的运动模态;第四节对机器人样机进行了表征,描述了机器人受运动磁铁作用下的响应,并介绍了机器人样机穿过多地形迷宫的实验结果;最后一节为研究总结。
图文导读
传统机器人通常采用电机或液压等驱动方式获取运动自由度,但该驱动方式无法应用于无系绳的微型机器人。将磁性颗粒掺入机器人本体,之后利用磁场进行远程驱动,已成为近年来广受研究者关注的热门技术。为便于建模和更好地模拟自然界生物,本文设计的机器人是由主体和腿足两部分构成,其中腿足部分均匀掺杂铁粉颗粒,以此作为机器人的驱动关节,如图1所示。
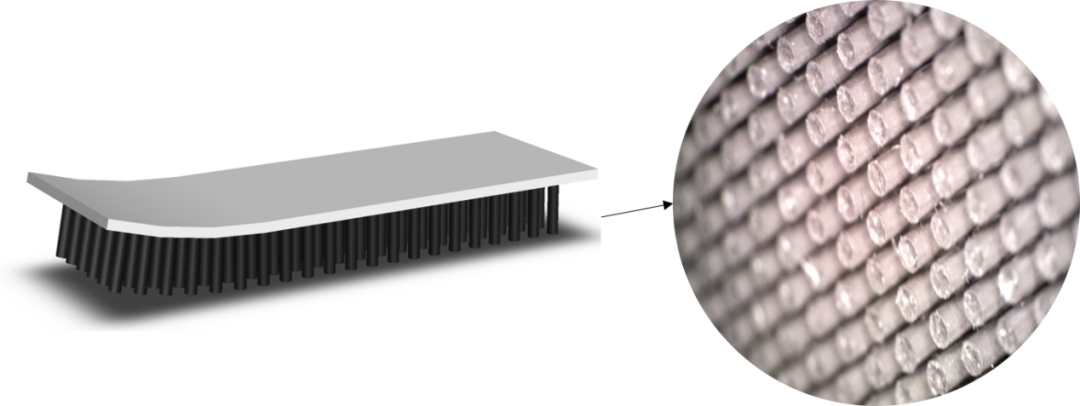
图1 磁控多足软体机器人的整体
本文设计了基于分体模具的两步制造法,其制作过程如图2所示。首先将铁粉末和硅胶树脂按一定比例均匀混合后倒入模具,在树脂半凝固时施加外磁场使混合物中的铁粉磁易轴与外界磁场对齐,以使机器人足部拥有对外磁场的顺应性;之后组装模具,并在模具上另附一层硅胶,待硅胶完全凝固后将其取下,即制得了可对外源磁场产生响应的机器人。

图2 磁控多足软体机器人的制作过程
机器人运动过程如图5所示。通过适度调节磁铁与机器人的相对位置,机器人的前部腿足会沿着磁场方向对齐,使机器人前部翘起,减少机器人与地面的接触,从而降低摩擦;而当磁铁被挪开时,机器人会向前拍打,同时磁铁的吸引力促使机器人向前挪移;当机器人的前部腿足完全接触到地面时,磁铁的吸引力无法克服增大的摩擦力,机器人停止前移,完成一整个前进步态。当磁铁做圆周运动时,机器人会循着磁铁旋转的方向,以摇摆的的姿态改变其朝向,以此完成转向。
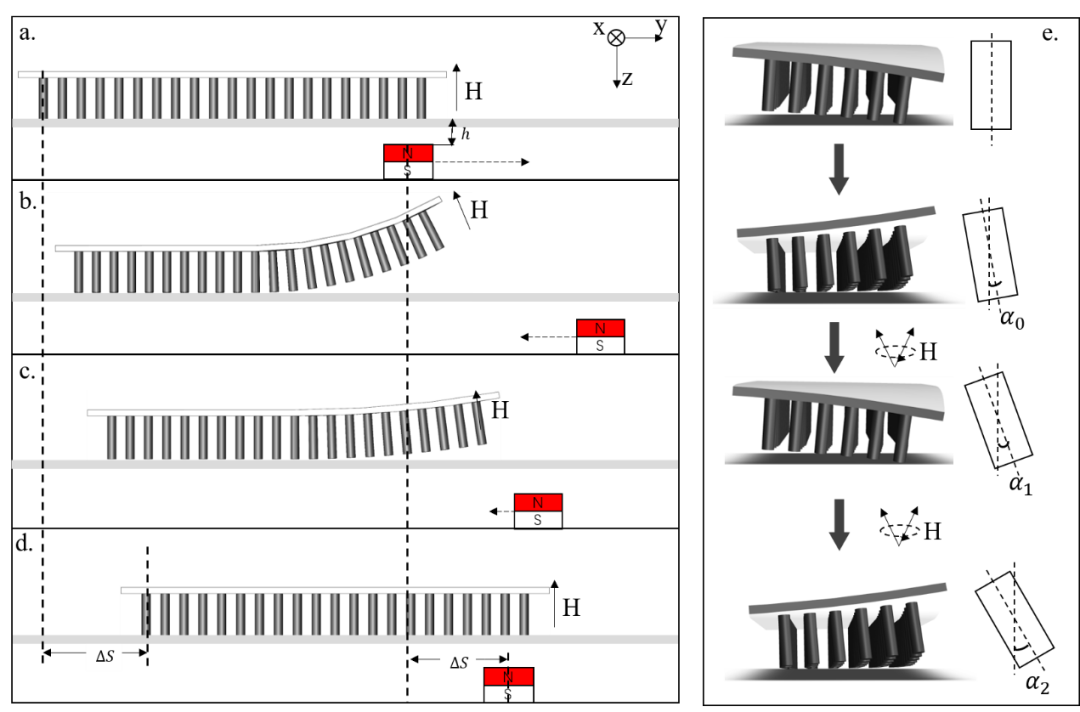
图5 磁控多足软体机器人的运动策略
本文提出的制作方法和驱动方式使得机器人在缩小尺度的情况下仍能保证一定程度的运动能力。如图8所示,通过控制磁场的变化,综合前进和转向两种运动策略,机器人有能力通过含狭角、路障、陡坡、浅坑的迷宫,表现出了良好的运动灵活性。
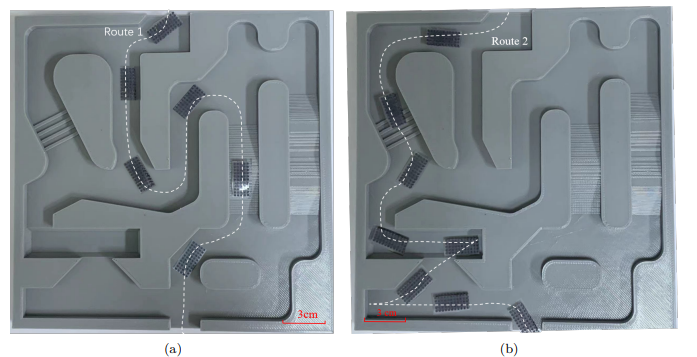
图8 机器人不同运动路径实验
【作者信息】
Danying Suna,b, Jingyu Zhanga,b, Qin Fanga,b, Pingyu Xianga,b, Yanan Xuea,b,c, Yue Wanga,b, Rong Xionga,b, Haojian Lua,b
a. State Key Laboratory of Industrial Control and Technology, Zhejiang University, Hangzhou 310027, China
b. Institute of Cyber-Systems and Control, the Department of Control Science and Engineering, Zhejiang University, Hangzhou 310027, China
c. Department of Plastic Surgery, Sir RunRun Shaw Hospital, Zhejiang University of Medicine, Hangzhou 310016, China
【DOI】
https://doi.org/10.1016/j.birob.2021.100030
【全文链接】

