提到张拉整体结构,很多人可能比较陌生。其实,张拉整体结构广泛存在于自然界中,比如人和动物的身体框架,蜘蛛网等。
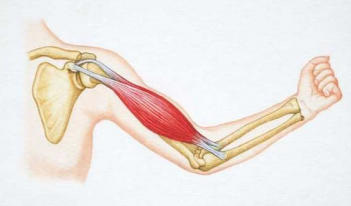
肩关节与肘关节
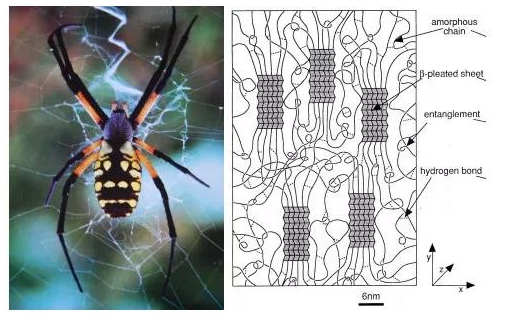
蜘蛛网
张拉整体的概念最早由美国建筑学家富勒提出。“tensegrity”(张拉整体)由“tensional”(张拉)和“integrity”(整体)合成。张拉整体结构是由一组不连续的受压单元(杆、棒等)与一组连续的受拉单元(绳索、弹簧等)组成的自支承、自应力的空间网格结构,其中受压构件之间并不接触,而预先张拉的构件形成了结构的空间外形。张拉整体结构最初被应用于艺术、建筑以及工程领域。


张拉整体结构在工程领域的应用
张拉整体结构刚柔并济,具有高机动性、高鲁棒性等优势,在机器人领域极具应用前景。研究者们已经开发了棱柱形张拉整体机器人、球形张拉整体机器人、张拉整体机械手和张拉整体仿生关节等各具特色的机器人。东京工业大学研究团队通过创新人工肌肉的排列方法,开创性地研发出具有主动大扭力的软张拉整体结构,并通过模块化张拉整体结构,设计了一种能够移除塑料瓶盖的张拉整体臂。所提出的结构能实现±50°的大幅度扭转,可以在不影响结构有利特性的前提下将扭转性能提升超过250%。该研究以Large Torsion Thin Artificial Muscles Tensegrity Structure for Twist Manipulation为题,在IEEE Robotics and Automation Letters期刊上发表。
图1 多功能软张拉整体机器人
▍多功能的基础——模块化的六杆张拉整体结构
张拉整体机器人具有环境适应性、可扩展性和高耐用性,非常适合替代人类完成洞穴和外层空间等未知环境中的危险工作。为了在上述环境中实现多种功能,机器人应采用模块化设计并且要求单个模块具备多种变形功能。张拉整体机器人有多种构型,包括棱柱型、六杆张拉整体型、十二杆菱形八面体型和脊柱型等。如图1所示,六杆张拉整体结构简单,易于收缩。与由3个支柱组成的最简单的棱柱结构相比,它还具有更高的对称性和自由度(DOF)。因此,六杆张拉整体可以构成具有多功能的机器人模块的基本结构,实现类似于生物体元素的拉伸、弯曲和扭转等基本变形模式的大变形。基于张拉整体结构的尺蠖型机器人如图2所示。
图2 基于张拉整体结构的尺蠖型机器人
目前六杆张拉整体机器人存在张拉整体结构变形程度小,大多数机器人运动都是被动且仅限于滚动运动等问题,不适合在未知空间中执行各种主动任务。
▍可扭可柔——扭转张拉整体结构设计
如图3所示,六杆张拉整体结构可以划分为4层三角形,这些三角形又可分为2对。通过组合每对三角形的扭曲,可以在结构中产生扭转。
图3 张拉整体结构的分层
如图4(a)所示,将2个三角形的顶点靠得更近会使得整体结构发生扭转。将本研究的实验团队开发的人工肌肉按图4(b)所示方法排列可以提高两点间收缩性能,弥补人工肌肉收缩率较小的缺点。如图4(b)所示,人造肌肉通过2个支柱放置,其顶点是要拉近的2个点。因为支柱的长度是不变的,人造肌肉的收缩转化为两点之间距离的缩短。如图4(c)所示,随着人工肌肉的收缩,α1和β1、α2和β2、α3和β3之间的距离缩短, 从而实现图4(a)所示的三角形之间的扭转。这种新颖的方法利用了人工肌肉在弯曲状态下被驱动的能力来实现张拉整体结构的扭转变形,而不会损害张拉整体的轻盈性和柔韧性。
▍100°的扭转变形——六杆张拉整体结构实验测试
在完成数值模拟优化后组装了六杆张拉整体结构的样机,施加到人工肌肉的气压在0.0 MPa至0.4 MPa之间,以0.05 MPa的间隔变化,使用运动捕捉系统来测量张拉整体变形。六杆张拉整体结构在正、反方向发生扭转变形的效果如图5所示。实验表明,六杆张拉整体可以在不损失轴向柔软性的情况下产生超过100°的扭转变形,同时保持约10%的高度变化。扭转角大约是先前六杆张拉整体结构的2.5倍,且高度方向的变化非常小,这表明所提出的方法可以使张拉整体模块产生主动而非被动扭转变形。
图5 六杆张拉整体结构在正、反方向扭转变形
▍开瓶盖与拧螺丝——张拉整体模块组装的机械臂首秀
如图7(a)所示,机械臂由4个模块组成,质量为339 g。顶部的2个模块产生大的扭转变形,模块II产生大的轴向收缩,模块III是抓取模块。模块III与模块I具有相同的人工肌肉排列,通过同时激活两组人工肌肉进行正向和反向扭转来实现抓取运动。在模块III上附上橡胶手指以抓住物体,图7 (b)显示了用于扭转的模块I、用于收缩的模块II和用于抓取的模块III。模块I可以扭转约80°,模块 II可以收缩约50%。
图7 张拉整体臂的组成 (a) 初始状态 (b) 加压状态
图8展示了移除瓶盖操作的5个关键动作。(a) 模块II伸展使手臂向下直到模块III抓住盖子。(b) 模块I沿松开盖子的方向扭转手臂。(c) 模块III松开盖子,模块II抬起手臂。(d)模块I扭转回到其原始状态。(e) 转动盖子四次后,可以在不松开盖子的情况下抬起手臂取下盖子。机器人从图8(a) 所示动作切换到图8(d)总共需要3.5 s(放下手臂0.5 s,抓住盖子1.0 s,扭转手臂0.5 s,释放0.5 s,抬起手臂0.5 s 和扭转手臂0.5 s)。
图8 张拉整体臂移除瓶盖操作的5个关键动作
使用张拉整体臂移除塑料瓶盖的实验效果如图9所示,夹持螺丝刀拧紧螺丝的实验效果如图10所示。
图9 使用张拉整体臂移除塑料瓶盖
图10 使用张拉整体臂夹持螺丝刀拧紧螺丝
▍多功能软张拉整体机器人的展望
通过整合多功能(拉伸、弯曲和扭曲)张拉整体模块,并将它们与张拉整体机器人形状的传感技术相结合,有希望开发出如图1所示的多功能的软张拉整体机器人,替代人类在未知环境或危险环境中执行复杂任务,同时识别周围环境状况。
原文信息:
R. Kobayashi, H. Nabae and K. Suzumori, "Large Torsion Thin Artificial Muscles Tensegrity Structure for Twist Manipulation," in IEEE Robotics and Automation Letters, vol. 8, no. 3, pp. 1207-1214, March 2023, doi: 10.1109/LRA.2023.3236889.
下载地址:
https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=10016717
